Fórum témák
» Több friss téma |
Bővebben: Link, Bővebben: Link, mindkettő jó lenne, aliexpressen nagyon olcsó, FET-es h-hidak, alig melegszik. Mindkettőt használtam már, szuperek. H-bridge keresőszóval meg fogod találni kép alapján a nyákot. az egyikre L298 van írva (amit linkeltem), viszont az IC teljesen más. Ha aliexpressről veszed, nem lesz lecsiszolva az IC, van hozzá korrekt adatlap is, csak amazonon így talán könnyebb eladni...
A hozzászólás módosítva: Márc 25, 2023
Szóval azt javaslod, ne építseg sajátot?
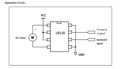
Csak mert azt terveztem, hogy felforrasztom a DC motor sejhajára olyan kicsbe megtervezem én ezt.Így nem foglalna helyet. Valahogy úgy mint a csatolmányon.
Ha nagyon kivsit keresel akkor nézd meg ezt is A4988. Ez 2 DC motort tud vezérelni.
Köszi, ha már ilyen IC-s megoldás lenne, akkor 5V körülről lenne jó ha üzemelne.
FET-tel, tranzisztorral, netán valami kicsi relével megoldani ezt a feladatot ördögtől való?
Tökéletes, kicsi és tudja amit kell! Köszönöm!
Még az a kérdés, ha 5V tápot kap, mennyit tud adni a kimenetére? Ezért jutott eszembe a relé, ott nem lenne feszültségesés a motoron kívül, még az is szóba jöhetne. A hozzászólás módosítva: Márc 26, 2023
Most, hogy írod... 9 V-os tápfeszültség és 750 mA-es terhelés mellett 7.6 V-ot szolgáltat. Aztán ez neked vagy elég vagy nem, valószínűleg elég lesz.
Tegnap nem jutott az eszembe a másik tipus a TBA6612 modul. Az ugyanakkora, mint az A4988 de a veszteség sokkal kisebb (0,5 V alatti). 6-10 Voltig mindenképpen jobb választás.
Ahogy Gafly is írja, például ilyenek a fordított polaritású 24-60 V-tal percenkénti léptetésű régi MÁV-os Pragotron órák. Néhány megoldás netről: Madarász László, WEMOS D1-el netes szinkronos, DCF77 szinkronos.
Jogos, korábban csat említés szintjén került szóba, nem határoztam meg mint kritériumot.
Sajnos egyelőre szeretném az 5V-os MCU táppal megoldani, relével szerintem biztosan meglehet, mert gyakorlatilag nincs a kapcsolóelemeken számottevő fesz esés. Megoldható ez esetleg valamilyen félvezetővel is? |
Bejelentkezés
Hirdetés |