Fórum témák
» Több friss téma |
Szia! Ha nem futtatom le ezt a konfig dolgot, akkor a gcode senderrel hiába próbálom mozgatni, nem fog semerre se menni egyik tengely sem?
Olyat csinálnak a motorok amikor léptetek a machine controlban, akkor csak fixálja a tengelyeket, nem lehet még kézzel sem mozgatni, majd amikor a senderben odaér, akkor már szabadon lehet mozgatni. Nano v4 shieldet használnék a4988 driverekkel. Köszi.
Attól mennie kellene, viszont a configban kellene beállítani a gépedhez a paramétereket. Step/mm, gyorsulás stb.
Nem is "cincognak" a motorok amikor menniük kellene de állnak? Idézet: . Ettől féltem. Most csupán csak az asztalon vannak összevezetékelve a motorok, nincsenek a gépben. „Attól mennie kellene” Annyit csinálnak a motorok, hogy stabilan állnak, nem mozdíthatóak a tengelyek, amíg parancs le nem fut a gcode senderben. A config.h-ban lehet nem jól vannak a lábak definiálva?
Szerintem inkább valami beállításon kellene változtatni. A 8-as trapézmenetes tengelynek általában 2mm a menetemelkedése. Nekem 4mm menetemelkedésű orsóim vannak és nem remeg. Akkor rezonált nagyon amikor egész lépéssel hajtottam. Amióta az A4988-as esetén lehetséges legnagyobb mikrolépéssel van hajtva szép egyenletesen jár.
Én kipróbálnám megvezetés nélkül csak a motor, anya, szán.
Kihúzni a két 9mm vezetést. Igy a befeszülés miatti apróbb ugrások kizárva.
Motorok jól vannak bekötve? Ellenőrizd le.
Jól. Meglett a bajság.Minden nanohoz a grbl firmware step/dir lábak ugyanarra vannak definiálva, de találtam egy oldalt, ahol a piros alaplapos shieldhez fel kell cserélni a cpu_map.h fájlban a step/dir lábakat. Most megy mind a 3 tengely, viszont az arduino keretprogram szerint stabilitási probléma lehet, ha 99%-a megvan írva a memóriának.
 Ám köszi a segítséget 
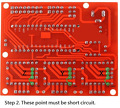
És még 16 microstepet sem lehet megúszni forrasztás nélkül, lásd melléklet

Ez "gyönyörű"
 . Nekem unos shieldem van, azok jók legalább . . Nekem unos shieldem van, azok jók legalább .
Nem is értem, miért a GND-re jumperolná, ha 16 microsteppinget akar az user, amikor H-H-H kellene legyen a konfiguráció. Ennek jól alászaladtam, de már működik
Egy 8" monitort kellene leváltanom. A mostani monitoron a kirajzolt grafika torzultan jelenik meg, a kör ovális például. És az alsó és felső sorok mérete különbözik.
A monitor jeléről a gépkönyvben ennyi infó van: Vertikális szinkron:50-60 hz pozitív Horizontális szinkron: 19.2 Khz pozitív Felbontás 600 sor. A monitorhoz 12 V megy és "3 jelvezeték". Érdekes megoldás mert a táp negatívját használja a jel negatívjának... Némi alkatrész adatlap böngészés után megállapítottam a horizontális és vertikális jelek melyik részt jönnek a csatlakozóból, fennmaradó egy pin már csak a videojel lehet. Jó lehet-e ez a panel a jelek átalakítására?
Szia! Jónak tűnik, mert ez a 19,2 kHz az EGA-monitorok frekvenciája.
Szia! Köszönöm. Mivel ezen a panelen nincs csak a "vga" bemeneten h/v sync így valószínű oda kell kötni. Érdekes de majd a video jelet egyik színjelre kell kötni. Szerencsére a nagyítás és a képhelyzet állítható. Nincs infó a jelszintekről, de ttl ic ken megy át így valószínű 5 V lesz az.
Sziasztok!
Rendeltem ebay-ról arduino uno panelt , hozzá tartozó cnc shield ,és motorvezérlőket + stepper ,és egy servo motort is! Nos összeállítottam az asztalomon , teszteltem az univerzális g-kód senderrel az x+- és az y+- tengelyt tökéletesen funkcionál! Amit viszont tapasztaltam , hogy ha átküldök mondjuk egy szöveges g-kódot , akkor minden szuper mozgásban vannak a stepperek , de a servo motor meg sem nyikkan ! Mitől van ez? A servo nélkül nem tudom hasznát venni ha megépítem a gépet , mivel nem emeli fel a servo kart az arduino !Másik problémám , hogy az inkscape nevezetű progival nem tudok g-kódot generálni , hibát ír a servo fájlban, csak a makercam.com oldalon tudok g-kódot létrehozni , de az meg nem működteti a servóm! Minden segítség jól jönne , mert sok időm elment rá , de gugliban sem találtam rá megoldást , de más sem , nem vagyok egyedül ezzel a hibával! Előre is köszönöm! A hozzászólás módosítva: Szept 1, 2019
Feltételezem ,hogy egy rajzoló plottert szeretnél készíteni ahol a mini szervó motor emeli fel a ceruzát. Ehhez fontos hogy olyan verziójú GRBL-t kell feltölteni az arduinóra ami megfelelően kezeli a servó motort is és a léptetőmotorokat is pl ezt letöltheted hozzá ekkor,ha CNC schildet használsz akkor a servó motor input kábelét a Z+ limitpinre kösd be ,mert ezen fogja kapni a PWM jelet. Kipróbálni úgy tudod hogy kiadsz egy G kód utasítást: M3 S250. Ekkor leengedi a ceruzát a S" paraméter értékének megfelelően. Ez lehet 0-255 érték. Az inscape programhoz telepítened kell megfelelő PLUGIN-t hogy jó G kódot tudj generálni a rajzoláshoz .ezt itt találod Használd inkább a LASERGRBL programot mert ez kezeli is a gépet és G kódot is készít
Sziasztok!
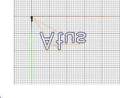
Lassan összeállt a gépem, nyomtam is egy teszt gcode-t. A szimulátorban jól lefut, viszont a végeredmény tükrözve van. Mi lehet a hiba? Köszi. Első kép az elképzelés, második kép amit a gép csinál.
Y motor tekercsét megforgatod? De akkor a végállást is valószínűleg át kell tenni.
Vagy a CNC működtető szoftverben megfordítod az irányt.
Holnap megpróbálom az Y motort megfordítani. Jelenleg végállások nélkül működtetem, mert a nano cnc shield pinjei igencsak nem stimmelnek

Köszöm a segìtsèget! Nos amiket lìrtàl megvolt minden , a bekötèseket is ismertem anèlkül neki sem mertem volna kezdeni!
a servòt mikor pròbàltam a command azaz a parancs mezőben M3 S100 akkor működött csahogy a parancs kiadàsàtòl szàmìtott 2 perc mulva , szòval kèsőn reagàl ! Rajzolàs közben meg sem mozdult sajnos! Tudom hogy a feltöltött progival van baj , csakhogy màr sokat pròbàltam, de egyik sem volt jò! Az ikscape progiba pedig bemàsoltam a unicode gcode plugint de a mentès màskènt szekciòban meg valami unicorn.py hibàra mutat!
Több fajta servós változat van, Amit linkeltem azzal nekem több gépen , is jól működik, ugyanazzal a hardverral,ami neked is van. Azt viszont nem értem hogy a servó motorod csak 2 perc múlva reagál a kiadott parancsra . Próbáld ki a linkelt GRBL-MI verziót. Ezzel működnie kell rendesen. A linkelt Inscape plugin is kimondottan ehhez készült. Egyébként nem kell ragaszkodnod az Inscapehez, mert a LASERGRBL mindezt egyszerűbben tudja megoldani. A legtöbb képformátumot kezeli.
Pipi-nek igaza van. Akkor nem tükröz a gép, ha a gépeden a kordináta rendszer helyesen van beállítva a jobbkéz szabály szerint. A géppel szemben állva X tengely jobbra növekszik, Y tengely távolodva növekszik Z tengely felfele növekszik
Megfordítottam a motor csatiját, egyből jó lett
Köszi nektek.A végállásokkal vagyok meglőve. Státuszukat le lehet kérdezni valahogy?
Mi a gond a végálláskapcsolókkal ? Ha helyesen bekötötted akkor fontos hogy engedélyezd a Hardlimitet a GRBL-ben ($21=1) ezután legyen engedélyezve a hóming is ($22=1) . Így már működnek a végálláskapcsolók a tengelyek túlmozgásának megakadályozásához. Ha viszont szeretnéd hogy rendesen működjön a homing ciklus is (referencia pont keresése) akkor további beállításokra van szükség. ($23=.. -vel tudod beállítani a home kapcsoló keresésének irányát. $25=..-vel tudod beállítani a keresés sebességét,$24=..-vel a másodszori finomabb" keresés sebességét,$26=.. Várakozási idő hosszának megadása a durva" és a finom'" keresés között. $27=..-vel azt állítod be hogy hány miliméter legyen az a távolság ami a már bekapcsolt kapcsolót ki tudja oldani. Amig a homing ciklus fut addig a végállás kapcsolók Hard limit funkciója nem működik. Ha lefutott és megtalálta a referencia pontot akkor újra végállás kapcsolóként működhet. Éppen ezért a végálláskapcsolók egyben lehetnek Home kapcsolók is.Hogy melyik legyen a home kapcsoló azt a $23=..vel tudod megadni
Ez lemaradt: $5=1 vagy $5= 0 beállítással azt tudod megadni hogy a végálláskapcsolók NO vagy NC állapotot használják, vagyis egy nyitott áramkört zárnak össze vagy egy zárt áramkört nyittanak meg
Köszi, ilyen leírást nem találtam sehol magyar nyelven
Holnap ezzel folytatom a gépet A hozzászólás módosítva: Szept 4, 2019
Köszönöm ! Megpróbálom mindenképp! Szép estét!
Üdv!
Sajnos nem és nem akarja az igazságot az általad feltöltött gbrl-mi vel sem ! Ugyan az , meg sem mozdul ! Vagy én csinálom rosszúl ? Nem értem ! Esetleg Muszáj berakni a jumpereket amit én nem tettem meg?
A jumperekkel a cnc schielden a léptetőmotorok mikroléptetését állítod be.Nincs köze a sevomotor karjának emeléséhez. A jumperekkel beállított mikroléptetést figyelembe kell venni $100,$101,$102 paraméterek megadásánál. (ha ezt nem ismered akkor írj privátban ,elmagyarázom) Arra tudok még gyanakodni hogy meg van sérülve a servómotorod burkolata alatti elektronika (vagy gyárilag hibás) esetleg valahol a schilden kontakt hiba...
Nem sérült a szervóm , mivel kipróbáltam arduinoban a servo speew-et feltöltöttem , ami oda vissza mozgatja a servó karját tökéletesen működik a motor ! Tanácstalan vagyok teljesen!
Egy g kód kellene hátha nekem abban van baj...
Egyébként ha kontakthiba lenne , akkor minden indításnál másként produkálná a hibát, de mindíg akkor indul el , sőt meg sem áll hanem erősen tekeri a kart mikor már eléri a végpontot akkor is , valójában túl akarja tekerni az ütközési ponton és nem áll meg , ha nem húznám le akkor lereszelné az egész fogaskereket az áttételben !
|
Bejelentkezés
Hirdetés |