Ebben a cikkben azt mutatom be hogyan lehet vezetéknélküli soros kommunikációt létrehozni egy Bluetooth-UART modul segítségével egy AVR mikrovezérlő és a számítógép között.
A soros porttal foglalkozó cikkemben már leírtam (LINK), hogy mennyire hasznos lehet ha a robotunk a számítógéppel tud kommunikálni UART-on keresztül. Ez mind szép és jó, csak van egy nagy hátránya: a kommunikáció vezetéken keresztül történik, ami némely esetben nem probléma, de egy mobil robot esetében ez a megoldás, érthető okok miatt, szóba sem jöhet.
Ezért egy olcsó megoldást kerestem arra, hogy hogyan lehetne a robotom és a számítógép között a vezeték nélküli kommunikációt megoldani.
4 lehetséges megoldás közül választhattam:
Én az alábbi képen látható Bluetooth-UART modul-t választottam:
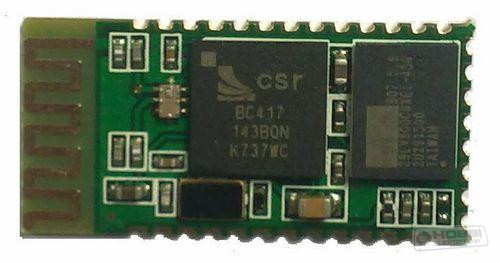
(kattints a képre)
Ez a modul a CSR BlueCore4-es chip-en alapul, támogatja az AT parancsokat, ezáltal a soros kommunikáció sebessége, a modul neve, PIN kódja szabadon állítható (ADATLAP, AT parancsok). A modul egyik hátránya, hogy csak Class 2-es Bluetooth osztályba tartozik (a hatótávolsága kb 10 méter).
Komolyabb alkalmazásokhoz mindenképpen egy Class 1-es osztályba tartozó modult célszerű használni (a hatótávolsága kb. 100 méter). Például ezt:

(kattints a képre)
A cikk még nem ért véget, lapozz!
Értékeléshez bejelentkezés szükséges!

