Fórum témák
» Több friss téma |
Cikkek » WILL-I V2.0 (Robotika és AVR kezdőknek) WILL-I V2.0 (Robotika és AVR kezdőknek)
Szerző: Fizikus, idő: Feb 5, 2010, Olvasva: 40855, Oldal olvasási idő: kb. 1 perc
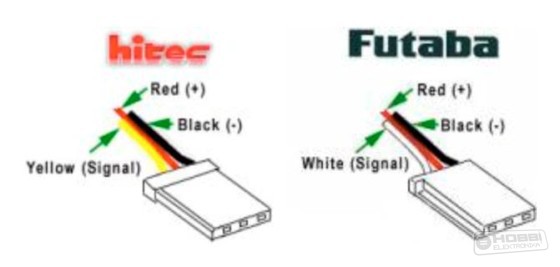
RC szervómotorok vezérléseA szervók működtetése három vezetéken történik:
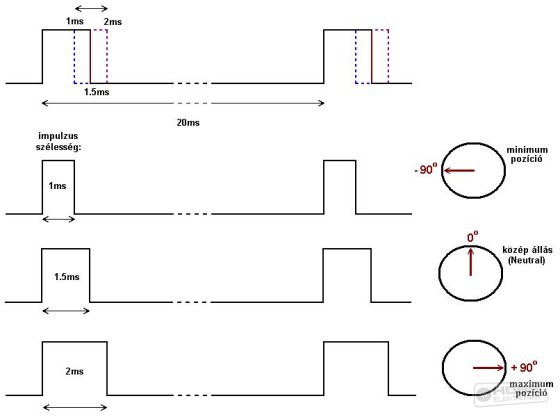
Az RC szervók ún. impulzusszélesség vezérelt motorok. A szervók vezérlése egy egyszerű négyszögjel alakú impulzussorozattal történik. A vezérlő impulzusoknak nem a nagysága (feszültsége) számít, hanem az, hogy mennyi ideig tartanak. A szervó pozícióját (hogy melyik szögbe álljon be) az impulzus szélességével tudjuk beállítani. Minden szervó 1,5ms széles impulzus hatására áll be középállásba. Az impulzusszélesség általában 1-2 ms között mozog, és az 1ms széles impulzus a bal oldali szélső pozícióba állítja be a szervót, a 2ms széles impulzus pedig a jobb oldali szélső pozícióba.
Különböző típusú és gyátmányú szervók mechanikai mozgástartománya (szögtartománya) és a vezérlő impulzus szélességek a fentiektől jelentősen eltérőek is lehetnek. A legtöbb szervó mozgástartománya általában 90° (±45), de vannak 120°-os (±60°) és 180°-os (±90°) un. nagy mozgásterű szervók is. Általában 1-2ms közötti impulzusszélességgel vezérelhetőek, de egyes szervóknál ettől különböző érték is lehet! Ezt próbálgatással ki kell kísérletezni. (Vigyázzunk, mert a szervó megrongálódhat, ha túlvezéreljük a mechanikai határain túlra!) A cikk még nem ért véget, lapozz! Értékeléshez bejelentkezés szükséges! |
Bejelentkezés
Hirdetés |