Fórum témák
» Több friss téma |
Cikkek » WILL-I V2.0 (Robotika és AVR kezdőknek) WILL-I V2.0 (Robotika és AVR kezdőknek)
Szerző: Fizikus, idő: Feb 5, 2010, Olvasva: 40976, Oldal olvasási idő: kb. 1 perc
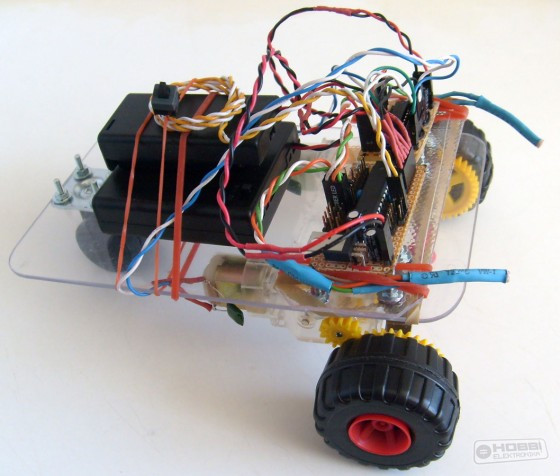
Ebben a cikkben 2 robot építésének tapasztalait írom le. Azt akartam elérni, hogy a robotok lássanak: ezt a célt a két robot esetében két különböző módszerrel valósítottam meg. Az első robot (RoboMoly) a fényerősséget érzékeli két fotoellenállással. A második robot (WILL-I továbbfejlesztett verziója) pedig egy infravörös távolságérzékelő szenzorral érzékeli a körülötte lévő tárgyakat.
Szegény WILL-I (Vili) korábbi verziója (LINK) csak vakon tapogatózott eddig a két mikrokapcsolójával, de mostantól már látni is fog! Azt akarjuk elérni, hogy a robotunk lásson, érzékelje a fényerősséget, vagy az előtte lévő tárgyak távolságát. Az alábbi két robot különböző elven érzékeli a környezetét, és a körülöttük lévő tárgyakat. RoboMoly: VILL-I V2.0:
A mikrovezérlőre megfelelően kapcsolt fotoellenállás a ráeső fény intenzitásától függően változó, analóg feszültségjelet ad a kimenetén. Az infravörös távolságérzékelő a távolsággal fordítottan arányos, nemlineáris analóg kimeneti feszültségjelet ad. Ahhoz hogy ezeket a jeleket a mikrovezérlővel fel tudjuk dolgozni, szükségünk lesz az Analóg-Digitális Átalakító (ADC) működésének a megértésére. A cikk még nem ért véget, lapozz! Értékeléshez bejelentkezés szükséges! |
Bejelentkezés
Hirdetés |