Fórum témák
» Több friss téma |
A kerekítést fentebb már írták, egyébként jó. Még annyi tippet adnék, hogy ha sikerül átszokni a 10-es számrendszerbeli gondolkodásról a 2-esre, a műveletek egyszerűbbé is tudnak válni.
Idézet: Naná hogy van: amikor külső adattárolón lévő alkalmazásokat kell futásidőben betölteni és futtatni. Ez gyakorlatilag minden számítógépnél, többfunkciós intelligens eszköznél, okostelefonnál, stb. alapvető követelmény, éppen ezért ezen eszközök feldolgozóegységei nem Harvard- hanem Neumann architektúrájúak. A 32-bites mikrovezérlőkkel épp ezt a területet célozzák meg. „Szerintem az összes ARM Cotex-M3 tud RAM-ból futni (hogy ennek van-e gyakorlati haszna, azt ne firtassuk)” Idézet: OK, de ez már az alkalmazásprocesszor (ARM Cortex-A) kategória. Én meg mikrovezérlőkről beszéltem. Két külön világ.„amikor külső adattárolón lévő alkalmazásokat kell futásidőben betölteni és futtatni.” Mikrovezérlő kategóriában csak olyan csodabogarak jutna eszembe, mint az Expressif ESP8266EX, amely SPI flash-ból olvassa be a programot a RAM-ba. Vagy a Texas TUSB3410.
Sziasztok!
tömbökkel aka(d)t problémám(.) 
hivatkozás rá: oszlopok (1,1,1,1,1,1,1,1,1,1); miért nem tudom az alprogramba átvinni a tömb érgtékét??? Köszönöm a segítséget elöre. A hozzászólás módosítva: Júl 3, 2016
Pontosabb mérést nyilván csak átlagolással lehet kihozni a 10 bites AD átalakítókból.
Amit írtam azt a PIC-ek átalakítójának minőségéről írtam a tápfeszből leosztott ref feszültség vonatkozásában. Egy 7805 feszültsége annyi amennyi, de ha fél év múlva megméred egy 1000 forintos műszerrel akkor is annyi lesz, ha nincsenek nagy környezeti hőmérséklet különbségek a két mérés közt (és nem hiszem hogy a két műszer hibája éppen kiegyenlítené egymást). Tehát az én meglátásom az, hogy ezen a pontossági szinten a tápfeszből leosztott ref feszültség sokkal kevésbé befolyásolja a mérés pontosságát, mint maga az átalakító. A hozzászólás módosítva: Júl 2, 2016
Nos, megkövetlek. Csak egy kis húzás, egy kis szurka piszka akart lenni, de ezentúl komomolyan, tartózkodni fogok mindenféle húzásoktól (főleg a tolásoktól) (viszont már Einstein is megmondta: ha sokat görbítünk, önmagunkba fordulhatunk).
Ő nem úgy fogalmazott véletlenül, hogy "befordulhatunk"?
Ráhívás:
A neveket majd kedvedre csiszolod. A létrehozott tömb önmagában automatikusan pointer, az oszlop_tomb típusa int*, az elemei pedig integerek, mint például oszlop_tomb[0]. Az első elem címe egyezik a tömb kezdőcímével, &oszlop_tomb[0] és oszlop_tomb azonos címekre mutatnak. Ha átvettél egy pointert, annak simán csak adhatsz egy indexet, és tömbként hivatkozhatsz az értékeire, lásd példa fentebb. A kódódban egyébként akad egy számomra érthetetlen dolog:
Az RC0 szerintem 1 bites érték, így az integerek legalsó bitje fog majd oda kikerülni, a többi pedig figyelmen kívül marad (autocasting), vagy az is lehet, hogy a fordító nem fogja megenni, és jelzi majd, hogy a változó szélességeket explicite kell castingolnod. Fordítója válogatja. Azt a híbát nem javítottam, mert a segítséget a tömb címzésben kérted, és különben sem tudom, mit is kell igazából csinálnia. Talán úgy lesz jó. Bármi C alapokat érintő egyéb kérdés van még, bőven találni fejtágítót is és példákat is például itt: http://www.cprogramming.com/tutorial/c-tutorial.html A hozzászólás módosítva: Júl 2, 2016
Shiftelésre használnám:
pl oszlop(1,0,1........) elso szintet világit(,) második nem(,) harmadik villágit .stb(.) oszlop(1,0,1,1,1,1,,1) igy sokkal könnyeb(b) lenne megoldani(,) hogy melyik szint villágithat(.)  (( (( A hozzászólás módosítva: Júl 3, 2016
Szerintem így egyszerűbb lenne:
Az unsigned int oszlop mondjuk 0b1111111110 bitmintát (vagy ahogy a MikroC-ben kell) beírod és így szerintem egyszerűbb. Ahol //... látsz ott nem kell változtatni.
STATUS.c mi<>az???
A hozzászólás módosítva: Júl 3, 2016
A Carry bit, nem vagyok a MikroC-be benne ott lehet STATUS.b0 vagy nem tudom, ha nem ismered a Carry bitet az baj, és sok sok kérdésedben alapismeretek hiányát láttam ezért ajánlom ezen oldal erős olvasását a belső felépítésről.
És szerintem nem facebook-on vagyunk..
Mégegy csodabogár: Microchip CEC1302 Low Power Crypto Embedded Controller. A CPU ARM Cortex-M4, maximális órajel 48 MHz, 128 K RAM: 96 K kódfuttatásra, 32 K adattárolásra.
Most már jó lenne, ha komolyan nekiülnél a helyesírásnak, vagy telepítenél fel egy ellenőrzőt!
Ha nem lesz az elkövetkezőkben változás, a hozzászólásaid nem fognak megjelenni.
Ezek szerint cégvásárlással is lehet ARM licenchez jutni.
Sziasztok.
16f628-on akarom az UART-ot életre kelteni. Egyenlőre a vétel se akar menni megszakításból. Ha a főprogramban vizsgálom a RCIF-et tökéletesen működik. Hiába engedélyezem a megszakítást (RCIE), egyszerűen nem akar bele lépni. Igaz most még csak proteusban tesztelem, de szerintem ott is mennie kellene.
A forráskód nélkül aligha látjuk, hogy mi a hiba....
Idézet: Ahhoz, hogy működjön még legalább 2 megszakítást kell engedélyezni. Azok megvoltak? „Hiába engedélyezem a megszakítást (RCIE)”
Ez a jelenlegi tesztprogram. TMR0 kikapcsolva.
Melyik az a két megszakítás amit még engedélyezni kell? A hozzászólás módosítva: Júl 3, 2016
Köszönöm a rávezetést. Egy ilyen sor beszúrásával egészen másképp működik:

Én a PIC16628-as leírásában nem találtam a megszakításról szóló fejezetet, de apró eltéréseket leszámítva ugyan olyan a megszakítási block minden PIC16-ban.
A képen látod, hogy a GIE kell ahhoz, hogy bármilyen megszakítás végrehajtás megtörténjen és mint írtad is a PEIE-vel meg a periferiális megszakításokat engedélyezel. Amit adott perifériákhoz PIEx regiszterrel engedélyezel és a PIRx regiszterrel vizsgálod, hogy ezen volt e megszakítás (a vége úgy láttam megvolt, csak így lett összefüggő a dolog).
Ha ezt a rajzot megtalálom lehet hogy hamarabb sikerül megoldani. Le van írva, hogy hogy kell konfigurálni ha megszakítást akarok (If interrupts are desired, then set enable bit
RCIE.) Én ezzel elintézettnek gondoltam a megszakítást.
16F627-628: DS40300C-page 101 Figure 14-14
16F627A-628A-648A: DS40044F-page 107 Figure 14-14
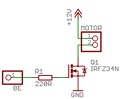
Egy 12V-os motort szeretnék vezérelni PIC-ről. Az ábrán lévő kapcsolás biztonságos vagy mást ajánlatos használni?
Azt, hogy mennyire biztonságos arról én nem teljesen tudok nyilatkozni, de ha biztosat akarsz tegyél egy optót oda, onnan (persze ha külön tápról megy a motor) nem fog semmi vissza kerülni a PIC-re.
Szia!
Ha közvetlen a PIC-ről akarod hajtani a fetet, használj logic fetet, ellenkező esetben nem fog teljesen kinyitni, és csúnyán melegedni fog. A rajzon lévő fet 10V-ot kér. Még jobb azonban, ha kimondott fet driver IC-t használsz hozzá. Az optocsatoló is jó választás, ha nem nagy sebességű PWM jellel hajtod. Csak ott fordítva üzemeltesd. A fetet ellenállással nyittasd, és negatívra húzza le az opto.
A motorban jellemzően tekercs van, annak pedig áram töltése. Húzni fogja akkor is, ha a fetet már lekapcsoltad. Mindenképpen rakj oda egy ellenirányban bekötött shottky-t is (kicsi nyitás idő kell) legalább dupla akkora árammal, mint amit a motor venni szokott (elhasználódás ellen). A diódát a motor kapcsaira kösd, ami a feten van, az csak a fetet védi, és vagy lesz a tápfesz szűrésben elég nagy kondi arra levezetni, vagy nem.
Sziasztok ismét én
.Időmultiplexes kérdésem lenne. 5x5x5 Ledkockáról lenne szó és az a bajom hogy ha egy alagzatott szeretnék kirajzolni vele mondjuk 2 másodpercig és 10 lépésböl akkor egésszen türhető a fényerő(több ideje van felvillania a lednek). Ha megint ugyan az a példa csak most 20 lépésböl akkor drasztikusan esik a fényerő. Erre van valami megoldás hogy kb azért 2 másodpercig rajzolja ki az ábrát és a fényerőse nagyon csökkenjen??
Köszönjük, az "azért sincs igazad mert csak" című hozzászólást.
De ezt betudom annak, hogy szakmai topikban vagyunk, ahol kötelezőnek érzi az ember az érvek nélküli cáfolást. Érdekes módon a könyveket sem foltozzák, hanem újra kiadják ha kell többször is. De úgy látszik a mérnökök többségének nagy fejtörést okoz egy dokumentáció kiegészítése pár apró szóval (ld. Zsora-nak írt hsz) vagy végfelhasználóként a használt dokumentáció naprakészen tartása. Egy olyan nagy cégnél meg mint a Microchip, ahol profi verziókezelő rendszereket alkalmaznak és nem szóbeszéd útján terjed a frissítés mint ahol te dolgozhattál/dolgozol, illetve ha kéred még e-mail értesítést is küldenek ha frissítenek egy adatlapot (PCN), annál elképzelhetetlen, hogy ezt a szerinted hatalmas logisztikai problémát ne tudnák felhasználóbarátabban megoldani. Szóval emögött inkább a nem akarás van, aminek tudjuk mi a vége... Mellesleg "aprólék javításról" nem volt szó, ezt te találtad ki.
Ha növelni akarod a fényerőt, akkor kisebb ellenállásokat kell tenni a LED-ek elé.
|
Bejelentkezés
Hirdetés |