Fórum témák
» Több friss téma |
Mi a terv a PIC-el ?
Párhuzamos be - párhuzamos ki shift regiszterhez nem kell PIC.
Szia! Bemenő jeleket feltételeket kapuzat és ad egy kimenetet ha a meg felelő bemenet megvan. 74hcs595 az a bemeneteket jelzi ki ez csak egy állapot jelzésre szolgál.
Így gondoltam, nem kellene nagy pic-ket használnom ( lábak miatt)
Van 20, 28, 40 stb. lábszámú kontroller, ki lehet hagyni a 74xxx IC-ket a játékból.
Igen tudom de pont ezt akarom elkerülni mert a ledek nem a panelen lesznek és így sokat kellene madzagolni. Ezért gondoltam ezt a megoldást.
Akkor nincs nehéz dolgod, nyilván először a 747HC165 bemeneteit valami beállítja, majd a PIC -el belépteted a shiftbe és kiiratod, a Q és a Q negált kimenetet én visszakötném a PIC bemenetre és egy változóba tárolnám a 0.1 értékeket. A beolvasott mintát összehasonlítanám egy meghatározott jelsorozattal, és ha egyezik, kiiratnám a HC595-re.
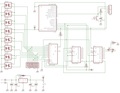
Gondolom a két shiftreg működése ismert, szóval tudod hogyan kell beleírni. Csak annyi lába legyen a PIC-nek ami a két regiszternek tud órajelet és adatot léptetni. Léptetőmotor vezérléseSziasztok!Segítséget kérnék. A mellékelt bipoláris léptetőmotor vezérlő szépen működik, a timer-t már 2ms-ra tettem,de még mindig lassú a lineális hajtás sebessége. Lehet valahogy még gyorsítani a jelek folyamát? Válaszotokat,segítségeteket előre is köszönöm.
Szia!
Valamikor itt a fórumon volt hasonló kérdés. Sajnos az időzítő minimum 2 msec időzítést lehet beállítani. Egyféleképpen ki lehet cselezni bár nem biztos, hogy elég. 4 MHz-es órajelet kell beállítani a programban és 20 MHz-en járatni a PIC-et. Üdv: Gábor
Nem tudom milyen a motor, de lehet, hogy nem is tud gyorsabban forogni. Egy tipikus 200 lépés per fordulatu motor a te esetedben 150 RPM-el forog szabadon, (terhelés nélkül) a 2 msec impulzusokra. Ez már közel lehet a határértékhez ami 400 - 800 RPM között van. Természetesen terhelés nélkül.
Ne tudom mi a feladat, vannak kisebb, de gyengébb motorok amik gyorsabban tudnak forogni. Ehhez ismerni kellene a feladatot meg a motor stb adatait.. A hozzászólás módosítva: Nov 22, 2025
Köszi az ötletet. Akkor megpróbálom 20 MHz-es rezonátorral is.
Hello! De közben ne feledd, hogy az összes időzítési ciklus is 5-ször gyorsabban fog letelni..
A fent linkelt kis lépétetőmotor vezérléséről van szó. Biztos hogy van bolygóműves lassítás is benne. 2ms-os időzítéssel kb. 3 sec alatt teszi meg a 12mm-es utat. A cél az lenne,hogy kb. 0,5 sec alatt tegye meg az utat.Mini léptetőmotor
Alin és temun lehet kapni mini lineális egység ( 12mm úthossz ),amin bipoláris léptetőmotor van,valószínű bolygóműves áttétellel. A 2ms-os időzítéssel kb. 3 sec alatt teszi meg az utat. A cél a 0.5 sec lenne.
ha linkelek is ,sajnos akkor nem jelenik meg a hozzászólás.
Milyen motor vezerlést használsz? Mikrolépést nem tud?
Itt a kis vezérelendő lineális hajtás. Lemértem,most nem 3,hanem 5 sec alatt teszi meg az utat.
Kapcsolási feladatot látna el,azért lenne szükséges a gyorsabb mozgás.
Próbáltam 20 MHz rezonátorral,azzal nem csinál semmit.
TMC2208-as motorvezérlővel próbálkoztam , fél lépéses beállítással,de nem tudtam működésre bírni. Erősen melegszik a motor,pedig az áramot visszavettel elvileg 150mA-re.
Jelenleg DRV8837-es H-híddal működik. A kis léptetőmotor tekercs ellenállása 14 Ohm. A motor táp oldalára tekercsenként 33 OHm 2W ellenállást kellett betegyek,így csak langyos a motor és szépen működik. 15 Ohm-al már melegedett.
Az előtét ellenállással korlátozod a motor áramát ,ezért csökken a sebessége . Nem ismerem a motorvezérlődet , de ha egy mód van rá a léptető impulzus szélességét csökkentsd (kitöltési tényező ) avval jobban szabályozható a melegedés-erő-sebesség "arány" A jobb motorvezérlőkön elég eg irány és egy léptető jel a többit a vezérlőn lehet beállítani ( egész-fél-mikrolépés- motoráram ) ha lassú akkor emeld a motormeghajtó feszültségét akár 1-2v al a maximum alá .
A hozzászólás módosítva: Nov 23, 2025
Na akkor több baj van.
A motor után vagy egy lassito áttétel, igy a motort már most az optimáls fordulatszámon járatod ( a 2 msec 150 RPMet ad) a tengely kb 20 menet = fordulat a 12 mm járatra amit most 3 sec alatt tesz meg, azaz 3 sec. A motor nem valoszinü, hogy 200 lépéses, hanem csak mondjuk 64 ( az nem tudjuk, de az gyorsabb mint a 200 lépéses). Azaz neked 64x20 lépést kellene megtennie a motornak a 12 mm mozgásra ez 0,5 sec alatt (áttétel nélkül) Az 2560 Hz vagy kb 0,0004 ms impulzus hossz, ez a freki már nem tud mozgatni egy stepper motort. ( az áttétel meg lassito, igy a helyzet még rosszabb ( ha csak el nem számoltam magam) az áttétel arányát talán ki tudod számitani, hány motorfordulat kell egy fordulathoz a menetes tengelyen.. Vegyél inkább lineáris szervot, az hasonlo felépitésü, de gyorsabb. A hozzászólás módosítva: Nov 23, 2025
Elvileg a TCM2208-cal jobban járnál, annak csak impulzusokat kell adni, pl. PWM-mel, azon meg akkora frekvenciát is tudsz beállítani, amit a vezérlő és/vagy a léptető már régen nem bír.
A Parsic, mint fejlesztőkörnyezet, elég nagy korlátokat gördít eléd több irányból is...
Köszönöm válaszod és mindenki másét is. Úgy látom,amire akarom használni ezt a lineális hajtást,arra nem lesz jó.
Sziasztok!
Akit érdekel parsic GPS program a data kal babráláskor újra kell másolni az UART vétel sort matek műveletekkel járművet is vezérel a szög század másodperc század része az változik folyamatosan de a tizedes része az jobb fél méternél már sokat változik. 8722 müködtetem de szerintem mindenen megy. GPRMC t használja.Program meg video !
A gps ? NEO6 m arduinohoz volt ajánlva az ebayon
Amikor villog zöld led akkor működik ,addig belső adatok jönnek Szerintem 1-5 perc mire működik , Idézet: Ezt kérdeztem ... „Akit érdekel parsic GPS program”
Az még mindíg csak vásárlással elérhető ? Mennyi az ára ?
Most nem tudom ,2019 ben vettem 200 euro körül.
Mert te mit használsz? ha megadod pic tipust ,oscillátort ,lcd kiosztást ,uart kiosztást átkonvertálom hex be.
Már régen feladtam a parsic-ot , nem láttam benne az ár érték arányt csak kíváncsi voltam mennyibe fáj . Én a flowcode 10 es verziót vettem meg 78 fontért egy modult az szerintem sokkal többet tud (több komponens -több proci)
A hozzászólás módosítva: Márc 6, 2026
|
Bejelentkezés
Hirdetés |