Fórum témák
» Több friss téma |
sziasztok. én szeretnék egy olyan kerékkel guruló robotot amin egy mini kamera van és egy adó vevő. egy ilyet szeretnék csinálni ha valaki leirja hogycsináljam mindezt. légyszi segitsetek!
 : :bow: köszi  
Szeva!
Mennyi pnzed van rá? És akkor csak annyit kell tudnia? Előre hátra jobbra ballra +kamera kép átvitel (esetleg hang)?
Mert akkor vegyél egy távírányítós autót, a konthában pedig lehet kapni, vagy a mini rc-n, kamera szettet 13 körül...hangot képet visz.
Hátha van is pénzed az lehet hogy akkorse elég, ha a tudás nincs meghozzá.Pl.:tudsz PIC-et programozni? Kétoldalú nyákot tervezni? smd-t forrasztani stb...
Mert ha nem akkor marad Gatery megoldása, ha meg mindezt már megtudod csinálni akkor majd segitenek az okosabbak mert még nekem se volt dolgom eggyikkel se :no: (de lassan itt van már az ideje :yes: )
én csak kezdő vagyok. de menyibe kerürlne gatery javaslata?

összesen?
de akinek van még ötlete az irjon
Szia!
A kamera (minirc.hu) 11.990ft színes képet és hangot visz. Irányíthatós autót meg amennyi pénzed van és menyire komolyat akarsz...de legalább 10e-t érdemes rááldozni.... Nézz szét online modell boltokban. Tehát szerintem max olyan 25-ből kijön minden. Persze a sz.g-en akarod nézni a képet akkor még kell majd egy tvtuner kártya ami kb olyan 5e ft.
inkább nem kell ugyse használom semire de buta vagyok
 inkább egy visszaszámlálós stopperes órát szeretnek mert azt tudom használni mindig bocside azért kösz a tipépet lehet hogy majd megcsinálom a kamerásautót inkább egy visszaszámlálós stopperes órát szeretnek mert azt tudom használni mindig bocside azért kösz a tipépet lehet hogy majd megcsinálom a kamerásautót 
Látogass el erre a honlapra: palcom.bmfnik.hu
Ajánlom a videók menüpontokat (2004-2005), és a 2007 OTDK doksi böngészését. Remélem segíthettem! üdv, keni
Itt van egy link erre csak egy adó-vevőt és egy kamerát kell szerelni:
http://www.geocities.com/tjacodesign/cerberes/cerberes.html
sziasztok!
Én is szeretnék csinálni egy robotot De nem ilyet. Hanem olyat, amit lerajzoltam.A képen a két nagy bumszli két vill.motor lenne. az elején pedig két fotodióda vagy fotoellenállás. 3 kereke lenne. a hátsó kettőt a motorok hajtanák meg úgy, hogy ha ugye nincs semmi előtte, a fotodióda átengedi az áramot és megy mindkét motor fullosan. ha mondjuk eltakarom a JOBB oldalit, akkor nincs fény, nincs áram, ezért a BAL motor leáll, a másik megy tovább--> igy elkanyarodik. szerintetek megvalósítható lenne?
Megvalóstható ez a működés, csak nem így. A forodióda, vagy fényérzékeny ellenállás egyébként nem tudom hogy egyforma működésű-e, de mindenesetre kétlem hogy szeretnének akkora áramot átfolyatni magukon, ami egy motornak kell, és ekkora feszültséget sem tuti. Tehát gy dirktbe a tápot rákötni és kész az nem megy.
Ha csak annyi kell hogy eltakarod nem megy, nem takarod megy, akkor szerintem egy tranzisztor elé kell illesztened a bázisra a fotoellenállást. A tranzisztor, vagy méginkább FET pedig kapcsolja a motornak a tápot. Ennél jóval kifinomultabb megoldás az lehet, hogy egy PIC egy-egy A/D konverterére kötve a fotoellenállásokat, mérni az ellenállással arányosan eső feszültséget. Ezzel pedig a motorok kapcsolásához a FET-ekre PWM jelet generálni. így a fénnyel arányos fordulatszámon forog a motor. Csak körülményes szaladni a robot után és takargatni ha kanyarodásra akarod bírni
na ez nekem magas volt
 legalábbis az uccsó bekezdés de az ötlet tetszik. reméltem Picet nem kell használni, mert ahoz nem értek nagyon... sőőt kicsit se de ha ez könnyedén megvalósítható engem nagyon érdekel legalábbis az uccsó bekezdés de az ötlet tetszik. reméltem Picet nem kell használni, mert ahoz nem értek nagyon... sőőt kicsit se de ha ez könnyedén megvalósítható engem nagyon érdekel Ha azt megtudnád mondani milyen fajta féle tranzisztorral próblkozzak, vagy esetleg egy sematikus rajzot is tudsz rajzolni azt nagyon megköszönném. nem vagyok nagy spiller a buliban, nem kell tőlem sokat várni, de szeretek építgetni Kössz szépen Idézet: „milyen fajta féle tranzisztorral próblkozzak” FET-tel probálkozz sztem is, valamilyen olcsóbb IRF tipusut pl IRF640 kb:160Ft, az érzélkelőt ami akarsz használni nem valószínű, hog jó lesz max sötétben mer a nappali fény bezavarna rendesen, ezt modulált infrajellel szokták megoldani. itt egy link: http://www.lynxmotion.com/Product.aspx?productID=56&CategoryID=8 ez egy ilyen érzékelő, users guideba van a kapcsolása, video is van rola a lapon. soxerencsét
Hello! én tok adni egy jó tanácsot ha fénykereső robotot akarsz csinálni. Rengeteg egyszerű kapcsolás van a neten LIGHTSKEEING robot néven!
szevasztok! a minap olvastam h a honda asimo nevű robotot milyen hosszú idő alatt fejlesztették meg h jópár millát belefeccöltek! most kifejezetten a járástechnikára gondolok!
Bővebben: Link mutatok egy linket ahol látszik h hobbiból épített távirányításu "harcoló robotok" vannak ha a piros robotot nézitek könnyen rájöhettek h nem csak járni tud de szökdelni is  sztem elég komoly kis cuccok és biztos nem került milliókba a fejlesztésük!én modellezni szoktam tehát vannak rc cuccaim(szervó szabályzó vevő adó minden ami kellhet) mi a véleményetek egy hasonló robotot összelehetne hozni vhogy egyszerűen olcsóból(max 20 ezer) itthon a sufniban? sztem elég komoly kis cuccok és biztos nem került milliókba a fejlesztésük!én modellezni szoktam tehát vannak rc cuccaim(szervó szabályzó vevő adó minden ami kellhet) mi a véleményetek egy hasonló robotot összelehetne hozni vhogy egyszerűen olcsóból(max 20 ezer) itthon a sufniban?  számítógépet programozni tudok(pascal,már a c is megyeket) pic programozást is tanulgatom számítógépet programozni tudok(pascal,már a c is megyeket) pic programozást is tanulgatom
Amúgy az asimonak a kifejlesztése azért került miliókba mert nem előre meghatározott mozdulatokat hajt végre mint egy ilyen kis rc szervókból összerakott robot hanem megtervezi a lépéseit "érzi maga alatt a talajt" áthelyezi az egyensúlyát stb
Egy ilyen rc szervókból felépített robotot viszonylag egyszerű megépíteni (hardware) de megírni rá a programot már nehezebb dolog! 20 ezer forintból !talán! kijönne (1db mini szervó kb 1000ft de lehet az kicsi a standard meg 2000-3000ft szokott lenni. A lábakba 10db szervó biztos kell (2 boka, térd , 2 csípő X 2 ) és még hozzá jön az akku , mikrokontroller , váz )
hát a vázat azt simán összedobom itthon :yes: akku az nem gáz..szervók már húzósabbak mondjuk van itthon néhány azokból is!lehet h elkezdem tervezgetni a hardver részét...de az adóm csak 4 csatornás mondjuk gondolom kéne egy pic aminek az lenne a feladata h ha egy szervó elfordul a lábban akkor ahoz képest a többi lábszervónak mennyit kell mozdulnia...így elég lenne sokkal kevesebb csatorna is
hát 16 szervó elég lenne sztem!de tuti h normál 30-40 g körüli szervók kellenek amiből a legolcsóbb 2000 ft
szóval a mozgatás olyan 32000 ft aluminium lemezeim vannak itthon abból lenne a váz...viszont a pichez nem naon értek még egyenlőre...amint lesz egy kis pénzmagom elkezdem a hardwer részt! senki nem tud lebeszélni! megéri kisérletezni mert egy ilyen robot több mint 200000 ftot kostál... Csak tessék megnézni
Tud nekem valaki ajánlani, egy tervet,programot vagy valamit robot tervezésre?

Csősztök
Mit gondoltok mennyire használható ez az ötlet robot helyzetének a meghatározására? Lézert irányítok a plafonra modulálom mondjuk 500Hz-el. A roboton elhelyezek 4 db fotodiódát vagy fototranzisztort (Melyik a jobb?) 2 szervó tetejére. A négy jelen FFT-t végzek és a szervókat úgy irányítom, hogy a plafonon lévő fix lézer pötty felé nézzenek. Így tudni lehetne egy fix pont irányát a robothoz képest. A másik pont a föld lenne 2 potméter végére súly. A harmadik irány egy iránytű lenne vagy 2 lézer külön frekvenciákon. Neten nem találtam hasonlót így hirtelenjében.
programok:
Solidworks a vázhoz. pc oldali szofver: -LabWiev -Code::Blocks avr oldal: - winAVR -Bascom - AVRStudio ARM oldal: -Yagarto bin utils. gyártáshoz: -EdgeCAM -EAGLE vagy valamilyen más NYÁK tervező Ezek többségét ha tudod használni, akkor ügyes vagy
Helló!
Kérnék egy kis segítséget, szeretnék építeni egy robot autótami nem megy neki a falnak .Az autó már megvan csak nem tudom ,hogy milyen szenzort használjak .Előre is köszi a segítsget.
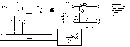
Csatoltam egy olcsón megépíthető akadály érzékelőt. Kb 10cm-re lát, ha 1 vevőhöz 1 ledet teszel. Ha több infraledet használsz, érdemes egy tranzisztorral kapcsolni őket.
Az 1k trimmerrel tudod pontosan belőni a 40kHz-et, a 220R trimmer pedig a led előtétellenállása; a fényerőn múlik, hogy milyen messziről érzékel. A vevő kimenete mehet egyenesen a mikrokontrollerbe, és ott már tiéd a világ.
Szia!
Maximum 6V, a katalógus szerint. Tipikusan +5V ot szoktak használni, mert általában az áramkör többi részének is ennyi kell. Katalógus: Bővebben: Link |
Bejelentkezés
Hirdetés |