Fórum témák
» Több friss téma |
Fórum » Léptetőmotorok (vezérlése)
Szia DjGeorge! Szeretném megkérdezni,hogy a láptetőmotort is tudok vezérelni a progiddal?
Sziasztok! 2-3 Unipoláris mocit szeretnék 1 Lpt portról vezérelni! Kérdésem,: Milyen progival tudom ezt elérni!
Sziasztok! 2-3 Unipoláris mocit szeretnék 1 Lpt portról vezérelni! Kérdésem,: Milyen progival tudom ezt elérni!
Nézz körül, azt hiszem a kapcsolások között van egy diszkó világítás ami szűrőkkel figyeli a hangot, és kapcsolgat lámpákat, neked nem lámpát, hanem irányt meg a motort kell hajtani, és nem is kell hozzá lépetőmotor.
Köszi a segítséget...
 Talán össze hozom valahogy bár ha volna valami léptetőmotros kapcsolás az mégjobb lenne mert hát egy léptetőmotor az léptetőmotor Talán össze hozom valahogy bár ha volna valami léptetőmotros kapcsolás az mégjobb lenne mert hát egy léptetőmotor az léptetőmotor  Mondjuk nem vagyok egy nagy elektrotechnikus épp ezért kértem segítséget...szal mégegyszer KÖSZI!!! Mondjuk nem vagyok egy nagy elektrotechnikus épp ezért kértem segítséget...szal mégegyszer KÖSZI!!!
Szerintem (amíg jobb nemlesz) elkellene kezdened megismerkedni a léptetőmotorok lelkivilágával - vezérlésével. Ha az már megy, akkor a hangvezérléssel sem lesz sok gondod. Én mindenesetre a SZTEP - DIR rendszerben gondolkodnék el! Mert ez lenne a leg egyszerübb a te szempontodból. Ha nemvagy rest és előről átlapozod a válaszokat, akkor a SZTEP - DIR vezérlés megvalósítására is lesznek kapcsolások...
Sziasztok! ULN 2003 - mas icre lehet 2 db unipolar mocit kötni,ha igen hogyan!
Az a gond, hogy az ULN2003-ban csak 7 kapcsolóelem van. S a két unipoláris léptetőnotornak meg 8 kivezetése...
 [off]( A közöspontokat nemszámítva...) [off]( A közöspontokat nemszámítva...)
Hogy lehet megoldani?
Lényeg hogy 2-3 unipolar mocit tudjak müködtetni 1 LPT-n keresztűl!
Hali! Szétszedtem pár rossz cd-írót és olvasót amit lehetett kimentettem belőle. A kérdésem az lenne hogy az a motor ami a lemezt pörgeti az milyen fajta az egyiknek 9 kivezetése van a többinek 11. És ezeket a motorokat hogyan lehet vezérelni?
Amikkel én találkoztam, azok 3 fázisúak. Találsz egy vezérlő IC-t, ami létrehozza a fázisokat. Az adatlapjára ha rákeresel a Googléba, abból megértesz mindent.
Hi!
kiszedtem egy epson nyomtatóbol egy léptetőmotort,4 kivezetése van, de a bekötés nem megy.Tud segíteni valaki?Köszi
Sziasztok!
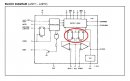
Segítségeteket kérném! Léptető motor vezérlőt tervezek és elakadtam egy résznél! Több vezérlő ic belső felépítését tanulmányozva mindenhol ugyan azzal a megoldással találkoztam és nem igazán értem! Példaként csatoltam az L297 belső felépítését! A pirossal karikázott részben a lényeg! Egy flip-flop ra érkezik a tekercs áramot figyelő komparátor jele és a pwm frekvenciát adó ipulzus sorozat! Kérdésem a köv: miért flip-flop? Miért nem egy sima és kapu? Mi gátolja meg, hogy R és S egyszerre legyen 1? Vagy nem értem az egészet?
Sziasztok! SLA7024 -es icvel hogy lehet léptetőmotort meghajtani?
Sziasztok! SLA7024 -es icvel hogy lehet léptetőmotort meghajtani?
Mondjuk úgy, hogy megnézed ezt az adatlapot.
Sziasztok!
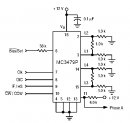
Van MC3479-es léptetőmotor vezérlőm. Ki szerettem volna próbálni, hogy lássam, ezért az adatlapján talált teszt áramkört megépítettem próbapanelen, annyi módosítással, hogy a (fordított) Phase A, meg a 4 tekercs kimenetre ledeket is tettem. A Phase A-n lévőnek A állás kivételével kellett volna világítani, e helyett folyamatosan világított (őt a GND-re kötöttem, így a 12V-ot a 4k-n keresztül kapta és világított kicsit, de a kimenet nem váltott GND-ra, azaz logikai igazra, így folyton ezt művelte). A tekercs kimeneteknek meg gondolom felváltva kellett volna, de azok nagy csendben voltak. Őket a 2-2 kimenetet összekötő 1k és a földre húzott 1k-k közé tettem be, így szerintem ha pl. L1-en megjelent volna a 12V, akkor a hozzá tartozó LED 1k-n, az L2 LED-je 2k-n keresztül kapott volna 12V-nyi tápot. Azaz lehet, hogy világított volna mindkettő, de az egyiknek csak kellett volna. A bemenetek: Bias/Set 56k és aztán GND. Az órajelet kézzel produkáltam (drót 12V-ba és a 7-es pint izgattam vele). A többit hagytam lógni. Már csak így kérdezek: Vajon hány hibát követtem el? 
Sziasztok!
Nem akartam külön témát nyitni emiatt és gondoltam ebbe a témába kicsit belevág a dolog! Szóval az lenne a kérdésem, hogy 5W os (vagy körüli) ellenállásból induktivitás mentest honnan lehet beszerezni? Lomex, HQVideo nem nagyon találtam! Léptető motor vezérlőbe szeretném a tekercs áramok figyelésére,de oda nem ajánlott induktivitással rendelkezőt rakni. (pl. WIREWOUND) A konkrét érték amit keresek, 0R51 5W az hogy hány %-os nem szempont.
Semmi sem gátolja meg, hogy az R és az S egyszerre legyen aktiv, gondolom úgy van felépítve, hogy ilyenkor az R legyen erősebb.
Azért tároló, hogy kialakulhasson a PWM, ha csak kaput raksz oda, akkor csak órajel sorozat, vagy semmi sem lesz a kimeneten. Azaz nem tudod elérni, hogy több órajelen keresztül 1-ben legyen a D. Így viszont igen, azaz amint telítésbe megy a vas, meg tudja szaggatni az áramot a két komparátoron keresztül... Emlékeim szerint ezen az adatlapon pont van is egy ábra, amin látszik a kimeneti áram katakterisztikája.
Pedig elképzelésem szerint akkor is működő képes lehetne. És kapu egyik bemenetére menne a komparátor kimenete ha mondjuk Uref 3V és Rsense 1Ohm akkor ha a "vas" eléri a 3A-t akkor nem ki-be kapcsolja az áramot a tekercsben hanem 3A körül egy sávon belül "hullámoztatja", mondjuk 2,9A-3,1A között. Így valósul meg a maximális áram korlát. Az és kapu másik bemenete pedig a PWM jel ami ha L akkor nem folyik áram a tekrcsben, ha H akkor a maximális áram folyik! Ha pedig mondjuk a PWM jelet 50% ra választjuk akkor a maximális áram fele folyik a tekercsben! Vagy tévedek?
Ebben a témában még kezdő vagyok , de volna egy kérdésem : Miért kell a meghajtóba a PWM ?
Csak a motor erejét csökkenti (és a melegedést?)?
Nem tudom honnan vetted azt hogy csökkenti az erejét?
Üzemeltethető a motorod, nagyobb tápfeszültségről, növeli a maximális sebességet, a nyomatékot, megtöbbszörözi a felbontását a motornak, csökkenti a rezonanciáját. Persze nem maga a PWM, hanem az ezzel kialakított áram szabályzás és microstepping.
Én kérdeztem ! Ezért le ne Baltázz Amint látod
a hsz ben írtam hogy "kezdő vagyok a témában " DE a kérdés onnan indult hogy ha egy jel kitöltési tényezőjét változtatjuk változik az effektív feszültség . Ha van egy fix feszültségem és csökken a kitöltési tényező csökken az eff tehát kisebb fesz jut a fogyasztóra ,ezért gondoltam hogy csökken a nyomaték .
A trükk abban van, hogy ez a feszültség sokkal nagyobb, mint a motor névleges feszültsége. A nyomaték mondhatni az áram erősségéből van, ami viszont nem tud kialakulni a z indukció miatt, ezért magasabb feszültségről indulunk és amikor elérte a névleges áramot csak akkor csökkentjük a PWM-el a feszültséget. Igy igazad van, a PWM valóban csökkenti az áramot, talán a nyomatékot is ha nincs telítésben már a vas.
Szerintem, ha a PWM helyesen van beállítva, akkor a névleges feszültségen üzemelő motornál nem is működik, vagyis folyamatos tápfeszt enged a motorra.
A PWM tulajdonkeppen egy modszer arra hogy szabalyozni (vagy vezerelni lehessen attol fuggoen hogy van-e aram meres vagy nincs) lehessen a motor aramat.
A motorra meg van adva egy maximalis aram amit elvisel. PWM hasznalata eseten az a cel hogy ezt az aramot ne lepjuk tul mivel akkor tonkre mehet a tekercs. E melle megadjak azt a feszultseget amin ez az aram kialakul. Tulajdonkeppen ellenallast is megadhatnank szerintem. Amit nem szoktak megadni az a motor induktivitasa. Legalabbis en meg nem lattam ilyen adatot. Nyilvan merheto. A motorra irt tapfeszultseget ha elfelejtjuk egy kis idore, akkor ami marad az az aramkorlat. (Azert tul nagy tapra nem erdemes kapcsolni a motort mert esetleg atut a tekercs szerintem.) A PWM-el tapfeszultsegtol fuggetlenul be lehet allitani egy adott aramot. Ehez az kell hogy a tap legalabb akkora legyen ami eleg a maximalis aram letrejottehez. Ezen a ponton erdemes eldonteni, hogy mire hasznalja az ember a PWM meghajtast. Nyilvan ez csak egy eszkoz annak erdekeben hogy a motor tekercsen atfolyo aram szabalyozhato vagy vezerelheto legyen. A ketto kozotti kulonbsegrol kesobb irok. - Adott esetben lehet, hogy csak arra van szukseg hogy az aram fix ertekre allithato legyen. Pl Imax-ra. - Elkepzelheto, hogy az aramot egy adott gorbe alapjan kell beallitani. Pl allo helyzetbol (lepesek kozott mondjuk tobb mint 100ms telik el) a motor elinditasakor megengedunk Imax*1.50-et. - Elkepzelheto hogy mikrolepest akarunk csinalni ehhez ket tekercsen kell egyenkent allitani az aramot. Normal feszultseggeneratoros meghajtashoz kepest a PWM-el nyerni lehet motor nyomatekot. A magasabb kapocsfeszultseg miatt meredekebben fut fel az aram a tekercsben, hamarabb tud leadni nyomatekot. Celszeru lehet addig tapot kapcsolni a tekercsre amig el nem eri a kivan aramot, majd ezutan inditani a PWM-et rogton egy kikapcsolasi ciklussal. Igy a novelt tapfeszultseg jotekony hatasa maximalisan kihasznalhato. A maximalis fesztultseg ami a motorra kapcsolhato az fugg a tekercs R-L idallandojatol es a szabalyozo/vezerlo gyorsasagatol. Ha tul keson lep eletbe a PWM akkor mar keso lehet... Vezerles: Itt a PWM jel elore meghatarozott ertek alapjan allitodik. Pl ismert hogy 50%-nal Imax*0.30, mig 90%-nel Imax*0.98 (ez csak hasrautes). Ha valtozik a tapfeszultseg akkor valtoznak az aramertekek is. Elonye hogy nem kell arammeres. Szabalyozas: Itt a PWM jelet az aramjel alapjan kell beallitani. Elonye lehet hogy fuggetlen a tapfeszultsegtol. Hatranya hogy adott esetben a szabalyzas belenghet (tul nagy aram), ez elonye is lehet pl indulaskor lokoaram. De lehet hogy lassu lesz a szabalyozas. Beallitastol fugg. Tovabba szukseges az aramjel merese.
Ne haragudj! Eszemben sem volt, hogy lebaltázzalak! Én is szimplán kérdeztem, hogy honnan szedted ezt? De tényleg eszemben sem volt!
Kyrk:
Látom te otthon vagy a témában, esetleg ha építettél is már ilyet akkor tudnál segíteni az oldalon lévő legfelső kérdésemre? (#314483)
Akkor ez úgy működik hogy a motor kivezetéseken nem egy léptető jel van hanem egy pwm jelsorozat ?
Nem tudom pontosan mit értesz ez alatt a kérdés alatt, de szerintem a válasz igen! De ha kifejted akkor esetleg tudom a választ!
|
Bejelentkezés
Hirdetés |