Fórum témák
» Több friss téma |
Sziasztok szeretnék épiteni egy USB-s "kapcsolo táblát" a léptető motor kapcsolásában látam, hogy kis mikro kapcsolokkal lehet mozgatni jobbra balra a motort.Ezért ugy gondoltam, hogy épitek hozzá egy usb-s kapcsolo táblát amit géppel tudnék vezérelni ugyanis robotot szeretnék építeni ennek segitségével így ha valaki tudna nekem ebbe segiteni annak örülnék én relére gondoltam 40kapcsolóra lenne szükség abba elöre láthatolag ráfér minden. Gépről szeretném irányitani, hogy mennyi ideig és melyik kapcsoló relé huzzon be.

Itt a kapcsolások közt van számítógépről vezérelhető relékártya , ha jól emlékszem 8 relé van rajta (legfeljebb építesz belőle 5 db ot
Ez jó lenne denem akarok ezért 5progit futtatni a gépen és nincs is anyi USB-m a gépen
 sajnos de azért köszi az ötletet sajnos de azért köszi az ötletet
át néztem a kapcsolásokat de nem találtam ilyet sajnos

Üdv! Egy ilyet találtam :Bővebben: Link ehez már csak valami USB/párhuzamos átalakító kellene és máris van 32 port.
Szia!
Egy AVR / PIC18F2550 és mátrixos vagy Charlieplexing módon illeszetett nyomógombok. A szükséges 5 * 8 nyomógomb lekeszelhető 13 portlábbal. Ehhez jön még 2 usb, 2 quartz, 2 vagy 3 táp, pic esetén még a Vusb láb. Azaz már 20 - 21 lábbal megoldható. Ha nem szeretnél Windows drivert írni, HID vagy CDC programmal lehetne megoldani. Esetleg a feladat megoldható más kontrollerrel is, aminek van belső uart illesztője. Ehhez még egy USB - COM konverter is kellene (kész egység vagy FTDI áramkör).
Ha veszel egy AVR-Duino -t azt kapásból dughatod usb-be. Com portra kell ezután adatot küldeni, majd a mikrovezérlővel akárhány relét kapcsolgathatsz.
Ugyan nem értem pontosan ezt a relés megoldásod, de szerintem túlbonyolítod, arról nem is beszélve hogy 40 relé 10e Ft-os nagyságrendbe kerül. Ennél ezt jóval olcsóbban meg lehet oldani.
A kifele menő vezérlő információt egy USB -re illesztett kontrollerrel SPI vagy I2C felületre kellene alakítani. Az SPI felületre 74HC595 léptető tárolóval lehet 8 bites egységeket készíteni, 5 db egység kiadja a 40 kimenetet. Az I2C vonalra 8 ill 16 bites portbővítőket lehet használni a 40 kimenet előállítására.
A 10 db léptető motor vezérlése, az időzítések betartása nem egyszerű feladat, kézi vezérléssel nem igazán megy. Inkább minden 1-2 léptető motorhoz egy - egy kontrollert kellene felhasználni, aminek meg lehet mondani az SPI vagy I2C felületen, hogy milyen irányban, mekkora sebességgel és hány lépést kell megtenni. A kontroller a 4 - 8 kimenetén maga állítaná elő a hullámformákat. A léptetés sebességét (néhány ms -onként kell váltani) a relék nem fogják bírni (sokáig), helyettük H-híd (pl L293, L298, stb ) meghajtót ajánlanék.
tudom hogy mindegy melyik portot használom csak nincsen csak USB portom
én csak felvetetem a relés megoldást más is jó de nyomógombot kell helyettesítsen
kinéztem az oldalon a léptető motor vezérlést és láttam hogy nyomógombos megoldású. Gondoltam akkor meg lehet oldani számítógépes megoldásban is és akkor lehet rá írni programot, hogy egy adott feladatot eltudjon látni. azért érdekelne az USB portos megoldás mivel csak az van a laptopomon amin dolgozom.
Ha jól értem neked az USB összeköttetéssel van problémád. Melyik oldallal akadtál el?
én maga a vezérlésre szeretnék valamilyen áramkört, hogy gépről USB-n keresztül tudjam vezérelni a motorokat.
egészen pontosan nyomó gombbolak kéne hogy az áramkör vezéreljen minnél hosszabb ideig tartja nyomva a gombot annál nagyobb fordulatot tesz meg a motor igy ha sikerül vezérlést építeni hozzá amit számitógéppel tudok vezérelni (esetleg késöbb AVR vagy PIC-el) akkor tudok irni programot rá hogy teljesen automatán müködjön a kis robot egyenlőre nincsenek nagy tervek csak mozogni tudjon a többit majd után építem.
Az a probléma, hogy az USB nem olyan egyszerű, egy áramkörrel nem lehet helyettesíteni.
A legegyszerűbb talán Hp41C és puli122 által is írt COM port emulálás. Vannak erre cél IC-k is, mint például az FTDI család. Ekkor a PC és mikrovezérlős rész is könnyebb. (Ahogy nézem saját GUI-t is szeretnél a PC-re.) De ezeket már leírták előttem...
szóval akkor ne akarjam usb-ről irányítani
 akkor maradhat felőlem a pic vagy AVR-es megoldás esetleg valami másik port csak akkor szerzek hozzá egy régi kis p1-es gépet azon van mindenféle port és nem lesz vele gond és mivel lenne a legegyszerűbb szerinted helyettesíteni a nyomógombot amit gépről tudok irányítani valamilyen módon ? akkor maradhat felőlem a pic vagy AVR-es megoldás esetleg valami másik port csak akkor szerzek hozzá egy régi kis p1-es gépet azon van mindenféle port és nem lesz vele gond és mivel lenne a legegyszerűbb szerinted helyettesíteni a nyomógombot amit gépről tudok irányítani valamilyen módon ?
Igazából te döntöd el mit használsz, csak tudj elindulni magadtól. PIC/AVR kelleni fog hozzá biztosan.
Az, hogy mivel helyettesíteném a gombokat az attól is függ, hogy milyen robot lesz és mire akarod használni. (Hasonlóképpen, mint Hp41C oldanám meg ezt a feladatot ennyi adatból kiindulva.)
Szerintem ha már úgyis mikrovezérlőzni fogsz hagyd azt a gombos kapcsolást. Ha biztosan működő elektronikával akarod kezdeni, rendeld meg amit linkeltem, vagy építs meg egy hasonlót. Azzal azt éred el, hogy Usb portra dugva kommunikálni fogsz tudni az eszközöddel. Pc oldalon vagy írsz saját programot, vagy először egy terminál program is megteszi. Ha ez megvan olvass utána hogyan lehet léptető motort vezérelni, valójában elég egyszerű. Mikrovezérlő kimenet meg kb 4 tranzisztor elég hozzá.
Ha ez megvan, ráakasztod az elektronikád az usb-re, elmulált com porton küldöd az adatot, amit lent földolgozol, és forgatod a motort. Szerintem ebből tanulsz a legtöbbet, és ez a legjobb tovább fejleszthető is. Ha például így csinálod, és vezeték nélkül akarod használni, csak kicseréled az alap panelt egy bluetooth-osra, és már mehetsz is 100m-re, nagyobb átalakítás nélkül. De ez így sem-úgy sem egy egyszerű projekt.
Ha szétnézel a honlapomon, akkor találsz anyagot a PC-n virtuális soros portként látszó USB illesztővel ellátott PIC mikrovezérlőkhöz (PICCOLO projekt). Nem nehéz összekötni Liberty BASIC vagy Processing nyelvűalkalmazásokkal,ha GUI kell (én eddig inkább parancssori módban kezeltem a demó alkalmazásokat).
Ha a PIC/AVR stb programozása megy, de nincs kedved az USB-vel szenvedni, akkor az aszinkron soros kommunikáció is elég, amihez készen kaphatsz USB-UART konvertert (nem az USB-RS-232-re gondolok, hanem TTL szintű jelet produkáló átalakítóra, lásd: link1, link2, vagy link3). Az ARDUINO vagy AVR-DUINOkártya is ezt csinálja, csak már rá van építve egy USB-soros (TTL) átalakító.
hát ez lenne az cél amit írtál hogy távolról is tudjam irányítani csak gondoltam először meg építem hogy kábelesen géppel tudjam irányítani és utána majd tovább fejlesztem
de mivel még AVR-el nem volt szerencsém igy maradna a PIC nem tudom ez nagy hátrány e ? és kizárólag hobbi robotka lenne mivel informatikai mérnöknek készülök robot karra így szeretnék próbálkozni hogy milyen lehetőségek vannak hogyan lehet meg valósítani meg ilyenek
És ahogy készül képeket csinálok és ha megold ható lehetséges hogy egy kapcsolás lesz az oldalra ha össze jön
Szia!
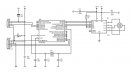
Bipoláris láptetőmotor 18F2550 -nel. A motoros rész ismételhető a szabadon maradt kontroller lábakon...
Sziasztok!
Van valakinek tapasztalata a LEC2 ( Let 'em click ) nevű programmal ? , ez egy többeközött conrad által forgalmazott usb-s relékártya vezérlésére való. Azt kéne tudnom hogy van-e lehetőség akár 10-ed másodperces késleltetések beállítására a programban.. |
Bejelentkezés
Hirdetés |