Fórum témák
» Több friss téma |
Cikkek » PIC-es motorvezérlés PIC-es motorvezérlés
Szerző: Ideiglenes, idő: Jan 19, 2011, Olvasva: 48619, Oldal olvasási idő: kb. 2 perc
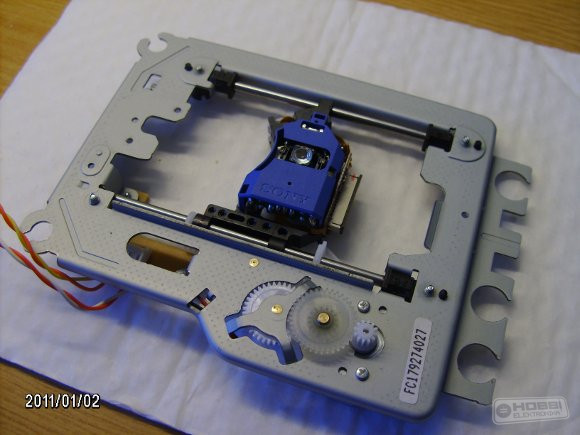
Egy idejétmúlt CDROM-nak a fejmozgató mechanikája lett felhasználva egy egyszerű programozási és illesztési példához.
Egy idejétmúlt számítógépes CDROM egység fejmozgató mechanizmusát kísérletezéshez félretettem és most került rá sor. A szelektív hulladékgyüjtésnek nagy híve vagyok, ezért lehetőség szerint mindent szétszedek, mielőtt kukába kerülne és így történt ezzel a CDROM-mal is. A műanyag részek a műanyagok közé, a fémrészek a fémhulladékok közé kerülnek. Sokszor elgondolkoztat, hogy milyen minőségi követelményeknek kellett valamikor megfelelniük a beépített alkatrészeknek, amiket aztán a szelektív hulladékgyüjtőbe dobunk. Íme a megmentett mechanizmus:
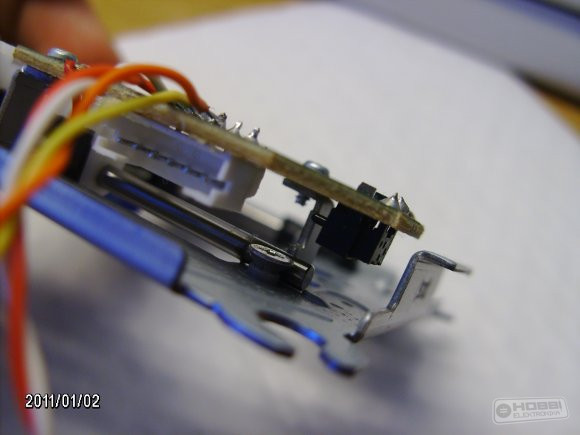
Általában szokott rajtuk lenni egy végálláskapcsoló, ami ezen például egy kontaktust ad, de vannak olyanok is, amelyek optikai kapuval vannak megoldva:
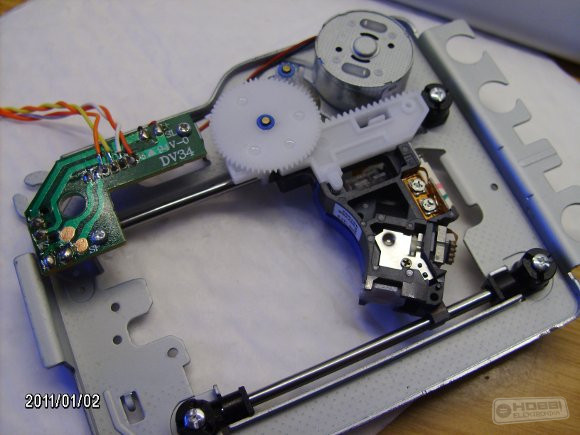
A kis pici motorról bővebbet ezen az oldalon lehet találni, ( egy adok-veszek oldal ). Ezeknek a motoroknak 4-5V-körül van a maximális üzemi feszültsége. A PIC-es rendszerben ezt a feszültséget nem is fogjuk meghaladni. Az egység funkciója az optikai fej mozgatása előre és hátra, nem tűnik bonyolultnak. Persze ha belegondolunk, hogy a felette forgó korongon egy vékonyka vonalat kell tudnia lekövetni, akkor már lehet gondolkozni azon, hogy többet tud ez, mint ami látszik. A kitűzött cél a fej oda-vissza mozgatása lehetőleg a fizikai korlátokat nem feszegetve, tehát ütközésmentesen, kihasználva a végállás adta lehetőséget is. Szerencsére a tervezők gondoltak arra az esetre, ha a szánkó túlszalad, nem áll meg időben. Ekkor ugyanis a fogasléc és az azt meghajtó fogaskerék között oldódik a kapcsolat, a fogasléc ügyesen kifordul a munkavonalából, így a fogaskerék bár csúnya kattógó hanggal, de szabadon tud futni. Ahhoz, hogy a kitűzött célt el lehessen érni, bizonyos részleteknek össze kell állni. Először is, hogy milyen vezérlő lesz alkalmazva. Idehaza általában PIC16F690-es szokott lenni, ezt már ismerem is valamennyire, így esett erre a választás. Meg azért is, mert van hozzá demo panel, ami a kísérletekhez nagyon jól szokott jönni. A gyári eredetit a magam szája íze szerint bővítettem alkatrészekkel, így lett a foglalat mellett jónéhány másik foglalat beépítve, amikbe alkatrészeket és vezetékeket lehet dugdosni. Nagyon hasznos. A további feladat megoldani valahogyan a motor és a vezérlő közötti kapcsolatot. Ehhez egy egyszerű kapcsolást állítottam össze, az ötletet valahonnan az internetről kapva. A motor irányváltása miatt van szükség a H-hídra, aminek a működéséről nem sokat árulok el ebben az írásban, mivel a neten rengeteg információt lehet találni ezzel kapcsolatosan. Hátra van még egy nagy feladat, mégpedig a szoftver, ami tulajdonképpen az optikai fej mozgatásáért felelős. Mivel hobbiról van szó, drága megoldások szóba sem jöhetnek, maradtam tehát a kedvencemnél, az ingyenesen elérhető SDCC fordítóprogramnál, ami C-ből fordít. A cikk még nem ért véget, lapozz! Értékeléshez bejelentkezés szükséges! |
Bejelentkezés
Hirdetés |