Fórum témák
» Több friss téma |
Cikkek » SRF-04 Ultrahangos távolságmérő szenzor használata Arduino-val és AVR-rel SRF-04 Ultrahangos távolságmérő szenzor használata Arduino-val és AVR-rel
Szerző: Fizikus, idő: Dec 7, 2011, Olvasva: 30038, Oldal olvasási idő: kb. 1 perc
SRF-04 Ultrahangos távolságmérő szenzor
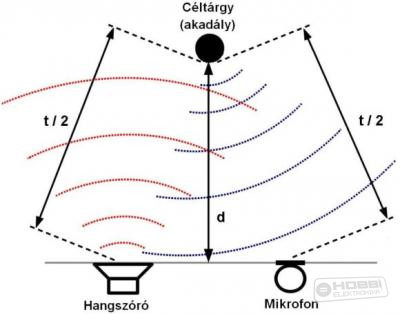
Az SRF-04 ultrahangos távolságmérő szenzor az emberi fül számára nem hallható tartományba eső ultrahangokkal, a szonár elv alapján méri a tárgyak távolságát. Ezek a modulok lényegében egy rövid ultrahang hullámcsomagot kibocsátó hangszóróból (adó) és a céltárgyról visszaverődött ultrahang érzékelésére szolgáló mikrofonból (vevő) állnak.
A magasabb frekvenciájú hangok kevesebb energiát disszipálnak, ezért az ultrahangok koncentráltabb, szűkebb nyalábban terjednek mint a hagyományos hanghullámok. Ez a tulajdonság segít a szenzornak abban, hogy csak az előtte lévő viszonylag szűk szögtartományban elhelyezkedő tárgyakat észlelje.
Az SFR04-es szenzor közvetlenül nem a tárgyak távolságát méri. A tápellátásért felelős VCC és GND lábak mellett rendelkezik egy un. Trigger és egy Echo lábbal is. Amikor a Trigger lábat legalább 10us-ig magas állapotra kapcsolják, akkor a szenzor egy 8 impulzusból álló ultrahang hullámcsomagot bocsát ki. Ekkor az Echo láb magas logikai állapotra vált, és mindaddig magas állapotban is marad amig a céltárgyról visszavert hang visza nem érkezik a detektorba. Az Echo lábon megjelenő jel hossza lényegében azt az időintervallumot mutatja ami alatt az ultrahang impulzus elér a céltárgyig és onnan vissza.
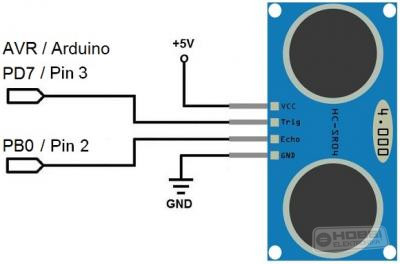
Az ultrahang kibocsátása és a visszaverődött hang érzékelése között eltelt idő mérésével, a hang terjedési sebességének ismeretében, a céltárgy távolsága egyszerű számolással meghatározható. A tárgyak távolsága az ultrahang által megtett út fele. A hang terjedési sebessége szobahőmérsékleten, tengerszinten 340m/s, ezért egy mikroszekundum alatt 0.34mm-nyi utat tesz meg, ami 0.17mm-es céltárgy távolságnak felel meg. Ez jó közelítéssel 10/58-al egyezik meg. Ezért ha az Echo lábon megjelenő jelet vizsgálva a visszhangig eltelt időt mikroszekundum-ban megmérjük, akkor a távolság az alábbi egyszerű képlettel számolható: Távolság (mm-ben) = visszhangig eltelt idő (us-ban)*10/58 Az SRF04-es modul maximális érzékelési távolsága kb 4 méter. A szenzort a példáimban az alábbi ábrának megfelelően kötöttem be:
AVR: SRF04 Trigger lába PD7-re kötve, az Echo láb pedig PB0-ra kötve Arduino: Trigger láb PIN3-ra kötve, az Echo láb PIN2-re kötve Összegzésként elmodható, hogy az SRF04 ultrahangos szenzor használatához az Echo lábon megjelenő jel időtartamát kell megmérni. Ez többféleképpen tehető meg. Erre mutatok 3 példát. Először egy Arduino panel, majd egy ATMega 8-as AVR felhasználásával. A cikk még nem ért véget, lapozz! Értékeléshez bejelentkezés szükséges! |
Bejelentkezés
Hirdetés |