Fórum témák
» Több friss téma |
Fórum
Üdv!
Adott egy power bank amit óra tápként szeretnék használni de néhány másodperc után kikapcsol.Az óra áramfelvétele fél másodpercenként 100-200 mA rövid impulzus a szünetekben néhány uA. Az usb-n csak a táp vezeték van bekötve. Hogyan tudom folyamatos üzemre bírni a power bankot? + terhelést nem szeretnék bekötni. Köszönöm. A hozzászólás módosítva: Feb 20, 2024
Adatlap szerint nem megy tönkre:
Idézet: „Analog Input Voltage (Either Input) (note 1) . . . . . . . . . . . . V+ to V- Reference Input Voltage (Either Input). . . . . . . . . . . . . . . . . V+ to V-”
Szia!
Ez sajnos nem ilyen egyszerű. Egy kommutátoros, univerzális motornak is lehetséges az úgynevezett szenzor mentes fordulatszám szabályozása, és így kis fordulaton is lesz érdemi nyomatéka, de ennek megvalósítása nem egyszerű, és nem univerzális. Az hogy nem univerzális, azt jelenti, hogy adott motorhoz illeszteni kell. A gyártó ismeri a fúrógépbe szerelt motor jellemzőit, és a szabályzó ezekhez a paraméterekhez illesztve képes a megfelelő szabályozásra. Hogy milyen jellegű számításokat, szabályozási feladatokat kell ellátni, itt egy link egy ilyen egyszerűbb szabályozási megoldásról szóló dokumentumhoz: Bővebben: Link Ez alapján beláthatod, hogy ilyen általános, univerzális fordulatszámot tartó szabályzót nem tudsz vásárolni. Vagy megveszed az eredetit, vagy megjavítod a régit, esetleg neki állsz, és a hobbi kedvéért megméred a motorod jellemzőit, és készítesz egy hozzá illeszkedő szabályzót. A hozzászólás módosítva: Feb 7, 2024
Sziasztok!
Az általam készített Arduino alapú csengővel kapcsolatos további információk és a kód: - A hang lejátszáshoz a TMRpcm lib-et használtam fel. - A kód tartalmaz DEBUG módhoz további kód részleteket, amik az élesztéshez kellettek nekem. Ezt kikapcsoltam. - Van benne SD kártya leállító és indító kód is. Bár ennek nem sok jelentősége van (kísérleteztem  ), mivel trafóról fog nálam működni a csengő. ), mivel trafóról fog nálam működni a csengő.- Az isFnMusic() függvényben több fájlnév kiterjesztés is látható a WAV-on kívűl. Ez ne tévesszen meg senkit. Tudomásom szerint a TMRpcm lib csak WAV fájlt tud lejátszani. - A kód tartalmaz egy kapcsolót is, mely az LM386 tápját hivatott ki/be kapcsolni.
Esetleg a "Forget Me not" nevű bővítmény.
Szia!
Rég volt, hogy ilyet írtam, megkérdeztem az agyat, hátha:
A megszakításaid címe jó? Nem kell a bank select? Hátha nem törli a flag-et. Datasheet A datasheet 116. oldalán az int0 0x08-on van, a tiéd, ami a programodban van ORG 0X0018 goto ISR_L az nem a SPI1RX (Serial Peripheral Interface) -nek van? De álmos is vagyok, meg nem is tudtam nagyon átnézni, de hátha. A hozzászólás módosítva: Jan 22, 2024
Segítséget kérnék az alábbiakhoz:
PIC18F16Q40-nél nem sikerül a megszakítást megírni Asseblyben. Ez egy új generációs PIC és nem találok rá még hasonló minta progit sem MPLAB X IDE V6.15-öt használok. Feladat: Alaphelyzetben 13. láb, LATB,4 kimeneten LED1 villog. (EZ MŰKÖDIK) Ha a 17. láb INT2-re impulzus jön, akkor a 16. láb LATC,0 kimeneten LED2-nek világítania kell (megszakításba ugrás) majd villog tovább LED1. A megszakításba ugrás nem működik.
A hozzászólás módosítva: Jan 23, 2024
Moderátor által szerkesztve
Sziasztok!
Járt már hasonlóképpen valaki? Vettem az asszonynak karácsonykor üzletben egy Xiaomi Redmi note 12 telefont, mert a fiam azt mondta, hogy ezeket már telefonnak lehet nevezni. 4.-én már vissza is vittem a boltba mert nem volt hajlandó tölteni semmiféle módon. Szerintetek jobb lett volna akkor elállni a vásárlástól? Mi a gyakorlat ilyenkor? Megpróbálják megkókányolni, mert ez nekem nem tűnt olyan könnyen szétszedhetőnek. A bolt meddig ülhet egy ilyen "javításon", ill. mikor köteles kicserélni egy újra? Köszönöm a válaszokat!
Egy ujabb fejlemény ( erröl nem is tudtam), hogy a SW hibáját elöször a posta ( bank) alkalmazottjaira kenték és kb 700 alkalmazottat büntettek meg. A bank alkalmazottajait ezért, mert a SW hiányt jelzett sok számlán amit lopásnak minösitettek.
Most a parlament dönt arrol, hogy kegyelmet és kártalanitást kapnak, de több mint 10 éves büntetett priusz rengeteg embert közülük csödbe vitt. ( egyszerü alkalmazottaktol bankfiok igazgatoig mindenki elöfordul a listán). Egy szoftware hiba miatt.
Mit tud a kuncsaft tenni, amikor átveri a bank (illetve magát a bankot is átveri valaki más)?
Ha meg marad valami apropénze biztos, hogy átmegy máshova, de ha nem marad semmi csak fizethetlen hitel akkor mi van? Talán meg emlékszünk a devizahitelekre. Külföldön ez sokkal gyakoribb, nem ritkán éjjel nappal jönnek a financiális mézesmadzagok, és sajnos mindig van egy réteg aki ész nélkül ráragad. Ha meg baj van, láthatod az esetben is, 36 évvel késöbb kerülsz sorra a kártéritésre. És azt sem tudjuk ki mennyit kap vissza, általában soha nem annyit amit vesztett. Nem ritkán a pénzügyek sajnos piramis játék szerüen épülnek fel, és gyakran annyira alattomosan, hogy még nagy és megbizhatonak tartott bankok is a vesztesek közé kerülnek. Föleg az angolszász világban a bank filozofia nagyon eltér a nálunk megszokottol. Ott bizonyos összeg felett a kuncsaft „befektet“ , ami mindig rizikoval jár.
Azért figyelhetnél jobban az irottakra.
1. a SW-t 36 évvel ezelött kezdték használni. ( kb 1988) 2. Többször merült fel közben, hogy valami nincs rendben. (valoszinü a banknak is) 3. a cég egyfolytában tagadott 2003-ig ( visszaélt az eröfölénnyel), amikor sikerült bebizonyitani a hibát. Te gondolod, hogy idöközben nem voltak upgradek stb. söt valoszinü, hogy a HW is közben (többször) cserélödött, mégsem történt semmi. És valoszinü nem a kuncsaft reklamált, hanem a bank meg végül valoszinüleg egy megbizott, szintén SW specialista cég, akik be tudták bizonyitani a hibát. ( látod mi történik hasonlo esetekben a repülögépekkel, autokkal, vonatokkal stb. Az utolso csavarig szétszedik, és mindent tüzetesen átviszgálnak, még azt is kideritik, ki huzta az utolso vonalat a rajzokra és levonják a konzekvenciát. Ilyesmit eddig nem igen hallottunk, ha a SW-ben fordul elö a hiba.) A hozzászólás módosítva: Jan 10, 2024
Egyetértek, szintén zenész.
https://forum.vcfed.org/index.php?threads/486-l2-cache-not-working.1241500/ A hozzászólás módosítva: Jan 10, 2024
Idézet: „Ezekszerint a szoftware fejlesztök valahogy nem felelösek a munkájuk minösegéért.” Komolyabb helyeken a szoftvert megrendelő ügyfél, jelen esetben a bank saját maga végez(tet) egy UAT-t (User Acceptance Test) Ennek célja, hogy a valós környezetben bebizonyítani, hogy a sw a követelményeknek maradéktalanul megfelel. Ha az nem történt meg vagy nem elég alaposan akkor a bank hibázott. Ha az UAT eredményét a bank elfogadta, akkor ő bizonyíthatóan elismerte, hogy a sw megfelel a követelményeknek. Ez után kár mutogatni a sw fejlesztőre. A hozzászólás módosítva: Jan 9, 2024
Angol barátaim meselik, hogy mi történt az utobbi 36 evben.
Az egyik neves bank ( fiokjai voltak minden településen) egy rossz szoftwaret használt. A szoftver gyártoja évekig tagadta, hogy hibás lenne. A betétesek ezrei vesztették el a pénzüket. Mintegy 20 éve a hatoságok bebizonyitották, hogy valoban hiba van a szoftwareben, és kényszeritették a neves közismert céget a javitásra. Most jutott el a biroság a kártalanitàsra ( már aki meg él a károsultak közül), de érdekes modon senkit nem vontak felelöségre. Pedig sokan vesztették nemcsak a pénzüket, de a házukat lakásukat is. Ezekszerint a szoftware fejlesztök valahogy nem felelösek a munkájuk minösegéért.
Gondolj bele, a fényérzékelő nem tudja megkülönböztetni, hogy körülötte van fény vagy a saját fényét érzékeli, tehát normális, hogy kivárja a beállított időtartamot, míg lekapcsol.
"This is a feature, not a bug."
Bocs, közben megnéztem a linkelt leírást is. Ő huntingnak nevezi a jelenséget és ír róla, hogy előfordulhat és hogy kell javítani:
"note that when used as a servo or speed control, you will experience hunting if the gain is too high, and/or if the feedback caps (C1 and C2) are too small (the arrangement shown below didn't require the caps). Hunting means that the servo will 'hunt' for the correct setting, but will overshoot and undershoot continuously" Tehát vagy a gain túl nagy, vagy a C1 C2 túl kicsi. >Három huzalja van: gnd és két + szál, egyik forgatja erre, a másik meg arra Belül mi lehet benne? Hogy működik? Azért nem biztos, hogy jó ötlet az analóg szabályozás, mert esetleg kis eltérésre folyni fog áram, de épp nem indul be a motor és feleslegesen melegítheti a szabályzó. Persze ha nem ég le, akkor mindegy. Meg nem is vagyok teljesen biztos benne, hogy előállhat ez a helyzet. Analóg rendszereken szerintem sokkal nehezebb hibát keresni, és például jelen helyzetben nehezebb beállítani a lengés mentes szabályozást is.
Sziasztok!
Működik a rendszer, de van azért hibája. Előfordul, hogy be se lép a while(1) részbe, csak esetenként a második bekapcsolásra. Van úgy, hogy megáll (lefagy) a 400ms késleltetés után és nem folytatódik a végtelen ciklus.
Sziasztok!
Mint az előbbi kérdésemben elővezettem, sok a tudatlanságom! Most hogy az idők rendben vannak a kérdés az, hogy miért nem lép ki while(!PORTB.F4); ciklusból a program, pedig a feltétel változik. /*PIC16F887 8MHz belső oszcillátor KÖZELEDÉS ÉRZÉKELŐ HC-SR04 ultrasonic szenzorral */ // LCD module connections sbit LCD_RS at RD2_bit; sbit LCD_EN at RD3_bit; sbit LCD_D4 at RD4_bit; sbit LCD_D5 at RD5_bit; sbit LCD_D6 at RD6_bit; sbit LCD_D7 at RD7_bit; sbit LCD_RS_Direction at TRISD2_bit; sbit LCD_EN_Direction at TRISD3_bit; sbit LCD_D4_Direction at TRISD4_bit; sbit LCD_D5_Direction at TRISD5_bit; sbit LCD_D6_Direction at TRISD6_bit; sbit LCD_D7_Direction at TRISD7_bit; // End LCD module connections //változók int a; char txt[7]; void main() { OSCCON=0b01110101; TRISB = 0b00010000; //RB4 bemenet PIN (ECHO) TRISD= 0b00000000; //minden RD kapu kimenet Lcd_Init(); Lcd_Cmd(_LCD_CLEAR); // Clear display Lcd_Cmd(_LCD_CURSOR_OFF); // Cursor off PORTB.F0=0; //trig kimeneti jel //PORTB.F4=0; Lcd_Out(1,1,"HC-SR4"); Delay_ms(2000); Lcd_Cmd(_LCD_CLEAR); T1CON = 0x10; while(1) { TMR1H = 0; TMR1L = 0; PORTB.B0 = 1; //TRIGGER HIGH Delay_us(10); //10uS Delay PORTB.B0 = 0; //TRIGGER LOW Lcd_Out(1,1,"itt vagyok"); while(!PORTB.F4); //Waiting for Echo T1CON.F0 = 1; //Timer Starts while(PORTB.F4); //Waiting for Echo goes LOW T1CON.F0 = 0; //Timer Stops a = (TMR1L | (TMR1H<<8)); //Reads Timer Value a = a/58.82; //Converts Time to Distance a = a + 1; //Distance Calibration if(a>=2 && a<=400) //Check whether the result is valid or not { IntToStr(a,txt); Ltrim(txt); Lcd_Cmd(_LCD_CLEAR); Lcd_Out(1,1,"Distance = "); Lcd_Out(1,12,txt); Lcd_Out(1,15,"cm"); } else { Lcd_Cmd(_LCD_CLEAR); Lcd_Out(1,1,"Out of Range"); } Delay_ms(400); } } A hozzászólás módosítva: Dec 29, 2023
Sziasztok!
Nemrégiben gépcsere volt nálam, a régi XP-s Win cserére került Win10-re. Ezzel együtt a korábbi Flowcode-om is megszánt létezni. Letöltöttem a díjmentes verziót, ez azonban nem hozza létre a kívánt hex-et. Az alábbi hibaüzenetet dobja: Idézet: „You do not have a valid licence to perform this action” (Amennyiben a HEX-be fordítást választom.) Hogyan lehet ezt kiküszöbölni? Előre is köszönöm a választ!
Ezt csináltam, a leírások alapján:
Nem próbáltam, nézd meg! Gondolatot ébreszteni..
A hozzászólás módosítva: Dec 13, 2023
Az SSDMP programot ajánlották hozzá, ami hajlandó is megszólítani, mint RTS5735DL vezérlő. Viszont amit találna magának B47R memóriatípust, arra jön a hiba:
Idézet: „Step 00 Generate Config -> Fail nand_support_list -> NandType : B47R, bank*.ram file -> NandType : B72B, Config mismatch” Illetve másik SSDMP verzió már RM1135-ként is kezeli, de a memóriára ugyan ez a panasza. A hozzászólás módosítva: Dec 11, 2023
Sziasztok!
Szeretnék készíteni egy csengőt. (Tudom, hogy lehet kapni, de az nem olyan, mert ebben ugye ott a hobbi meg a kihívás. )Szóval a kapcsolás a következő: - Arduino Nano - SD kártya - nyomógomb - FET az LM386 táp kapcsolásához - LM386-ra épülő erősítő (Mellékelem a kapcsolási rajzot) A programot sikerült összeraknom (természetesen nem magam találtam ki. Google a barátom. )Működik is, ha megnyomom a gombot, akkor lejátssza a wav fájlt. Eddig jó, de szeretném úgy módosítani a programot, hogy az Ardu-t szeretném elaltatni, majd ha a nyomógombot megnyomom, akkor feléledve játssza le a wav fájlt, majd ha vége, akkor ismét menjen aludni. Na itt kezdődik a problémám. A kódot módosítva el is megy alvásba a CPU, majd a gomb megnyomására csak zúgást lehet hallani a hangszóróból. Végig próbáltam már egy csomó példakódot, természetesen a doksit is elolvastam, és abból is próbáltam információt szerezni, de a helyzet nem változott. A kérdésem az lenne, hogy miként tudnám a CPU-t elaltatni, majd a gomb megnyomására lejátszani a wav fájlt? Ebben kérnék segítséget. Előre is köszönöm. Íme a működő kód:
A hozzászólás módosítva: Dec 11, 2023
Azt még eel kéne dönteni, hogy a háromfázisú gép szinkron, vagy aszinkron.
Szinkron motornál (állandó mágnesek vannak benne, általában a forgórészben) csak a frekvenciától függ a fordulatszám, ha túlterhelés hatására kiesik a szinkronból, akkor megáll. Aszinkron motornál csökken a fordulatszám a terhelés hatására, vagy a motoráram (feszültség) hatására, mert nő a slip, de ez is csak a billenő nyomatékig. Kapcsolásom ugyan nincsen, de emlékeim szerint egyszer találtam egy kapcsolást a Microchip cég egyik AN xxx (application note) -jában. Elő kéne bányásznod.
Sziasztok,
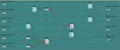
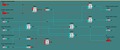
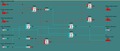
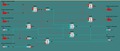
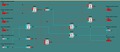
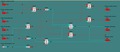
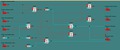
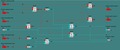
Egy kis segítségre lenne szükségem, nem bírok magamtól rájönni a dolog nyitjára. Összeraktam a kazánvezérlő PLC-m programját, gyönyörűen teszi is a dolgát, viszont szeretnék még belerakni egy kis funkciót. Nagyjából sejtem, hogy hogyan kéne, de nem bírom összerakni hogy tényleg működjön is. Van ugyebár 6 bemenetem: I00 - Földszinti szobatermosztát I01 - Emeleti szobatermosztát I02 - Puffer hőmérséklet a tetejénél (egy digitális termosztát 30+5fokra állítva [30 fok, 5 fok hiszterézissel, azaz 35 foknál BEkapcsol, 30 foknál KIkapcsol) I03 - Puffer hőmérséklet az alsó harmadánál (ugyanolyan digit termosztát 30+25 fokra állítva, 55foknál BEkapcsol, 30 foknál KIkapcsol) I04 - Bojler hőmérséklet (harmadik ugyanolyan digit termosztát, a bojlerben lévő hmv hőmérsékletét figyel) I05 - ATMOS kazánszivattyú üzem - Azt figyeli, hogy jár-e az Atmos faelgázosító kazán szivattyúja (ha jár, akkor nem indítjuk a gázkazánt, mer' minek, hiszen éppen tüzelek a faelgázosítóban) És van 4 darab kimenetem: Q02 - Földszinti padlófűtés szivattyú indítása Q03 - Emeleti padlófűtés szivattyú indítása Q04 - Gázkazán váltószelep átállítása a puffer felől a bojler felé Q05 - Gázkazán indítása Az alap logika az alábbi: - Ha bármelyik szobatermosztát kér hőt a házban, ÉS nem ég a tűz az ATMOS szivattyúban, akkor elindítjuk a gázkazánt. Ha ég a tűz az ATMOSban, akkor a gázkazán nem indul el, mer minek. - Ha a pufferen a felső termosztát 35 foknál melegebbet mér, akkor elindítjuk a padlófűtés szivattyúkat, alatta leállítjuk őket, hogy ne hűtsék ki a padlót, ha valamiért mégsincs semmilyen fűtés (leég a faelgázosító, a gázkazánt kikapcsoltam, és elfogyott a pufferből a melegvíz) - Ha a pufferen az alsó termosztát melegebbet mér, mint 55 fok, akkor leállítjuk a gázkazánt, hogy ne fűtsünk túl. Ha az alsó termosztát visszahűl 30 fok alá, újraindul a gázkazán, mert a termosztáton magán így állítottam be a hiszterézist - Ha a bojler termosztát jelez, mert hideg a HMV a bojlerben, ÉS a puffer tele van melegvízzel (felső és alsó termosztát EGYSZERRE ON), VAGY üzemel az ATMOS, akkor megengedjük a gázkazánnak, hogy fűtsön a bojlerbe, azaz Gázkazán indítás ON, ÉS Gázkazán váltószelep ON. Azért csináltam így a logikát, mert a ház fűtése a prioritás, és ha a pufferben van 500 liter 55 fokos víz, arról simán elmegy a két szint még két órát, a bojlert meg max fél óra alatt felfűti a gázkazán. Ha a pufferben kevés a melegvíz, akkor a gázkazán a házat fűti. és persze, ha ég a tűz az ATMOS-ban, akkor persze nyugodtan fűthet a gázkazán a bojlerre Ezt a logikát jeleneleg a PLC 8 állapottal kezeli le, csatoltam a képeket. PLC01 - alapállapot, semmi nem on. PLC02 - bármelyik szobatermosztát kér hőt, ÉS nem ég az Atmos = elindul a gázkazán PLC03 - elkezd telni a puffer felül, indulhatnak a padlószivattyúk is PLC04 - A puffer 3/4-ig tele van 55 fokos vízzel, leáll a gázkazán, a szivattyúk továbbra is tolják a vizet a padlóba PLC05 - A bojler kér hőt, de a puffer nincs tele = a gázkazán továbbra is üzemel, de nem állítjuk át a váltószelepet, továbbra is a pufferbe fűt PLC06 - Puffer tele, bojler is kér hőt = gázkazán üzemel, váltószelep átvált a bojler felé PLC07 - Puffer nincs tele, DE megy az Atmos (azaz a faelgázosítóval fűtöm a házat) ÉS kér a bojler hőt = indulhat a gázkazán, és átváltjuk a váltószelepet PLC08 - Ég a tűz az Atmosban, bojler nem kér hőt, gázkazán letiltva. Ez így tök jó. Viszont azt szeretném még belefaragni a programba, hogy a gázkazán csak akkor induljon ÚJRA amikor nem ég az ATMOS - vagy azért, mert be se gyújtottam, vagy azért, mert már leégett - amikor a puffer TELJESEN kihűl, azaz amikor kihúzta belőle a padlófűtés az összes melegvizet. Azért szeretném ezt elérni, mert sokszor előfordul, hogy leég az ATMOS, a puffer felül 85 fokos, alul viszont csak 35, de a ház már csak egy óráig kér hőt, azaz tök felesleges ráfűteni a pufferre a gázkazánnal, mert a benne lévő 3-400 liter 85 fokos víz még bőven elég. Jelen állapotban a gázkazán beindul, ha az alsó puffer termosztát 30 foknál hidegebbet mér, és nem indul el, ha 55 foknál melegebbet. Azért is jó lenne ez a funkció, mert ha nem gyújtok be az ATMOSba, és csak a gázkazán fűt, akkor is csak akkor indulna újra, miután a felső puffer termosztát is lehűlt. Ezzel lehetne spórolni elég sokat, mert így az van, hogy amíg kér a ház hőt, és a pufi nincs tele, megy a gázkazán, aztán mikor lekapcsolnak a szobatermosztátok, ott állok 5-600 liter 55 fokos vízzel tök fölöslegesen. Ezt a felesges fűtést lehetne megspórolni, ha a gázkazán csak akkor indulna be újra, mikor az egész puffer újra csak 30 fokos. Azon gondolkoztam, hogy valami olyan funkcióblokkot kéne berakni a puffer termosztátok jelei után, hogy "lefutó él figyelés", és azt összerakni egy ÉS blokkba, azaz a gázkazánt akkor indítjuk el, ha mindkét puffer termosztáton történt lefutó él, azaz BE-ről KI-kapcsolódtak, MINDKETTŐ. Azaz csak akkor, amikor a felső is lehűlt. De ezt nem sikerült sehogyse összeraknom eddig. Az APB PLC-m ilyen funkcióblokkokat tud, ebből kéne megoldani valahogy: ÉS ANDL (kimenet akkor kapcsol, ha MINDEGYIK bemenet logikai 1 értéket vesz fel, ÉS a bemenetek közül egy az előző ciklusban NEM volt bekapcsolva) VAGY not (negálás, jelfordítás) KIZÁRÓ VAGY Negált ÉS NANDL (a kimenet abban az esetben kapcsol, ha EGY bemenet logikai értéke 0, és az előző ciklusban MINDEN bemenet logikai 1 értékű volt) Negált VAGY VAGY felfutóü él figyeléssel VAGY lefutó él figyeléssel (Ha legalább egy bemenet értéke egyről nullára vált, akkor a kimenet logikai 1 értéket vesz fel) Tud még mindenféle mást is, mint pl TOND (Bekapcsolás késleltető), PONS (impulzus adó), SPBL (impulzus relé), BLNK (ütemadó), meg mindenféle egyebet is, de elvileg az alapokkal meg kéne tudni csinálni, nem? Az első gondolatom az volt, hogy mindkét puffer termosztát jele után teszek egy "VAGY lefutó él figyeléssel" blokkot, amikbe semmi más nem lesz bekötve, csak maga a termosztát jele, és azokat összehozom egy ÉS blokkba, és ezzel megszakítom a gázkazán indítás előtti logikai sort. Össze is raktam, kipróbáltam a szimulációban, de nem volt jó. Na meg ugye, az is kell, hogy elsőre elinduljon a gázkazán, mert ha ez az alapállapot, akkor sose fog elindulni a gázkazán ELSŐRE, hiszen előtte nem történt a pufferben lefutó él egyik termosztáton se. Tudnátok segíteni, hogy hogy kéne összerakjam ezt a plusz funkciót?
Szerintem nem power bank modullal kellene megoldani, hanem inkább LiIon töltő modullal.
Azon az akku csatlakozón állandóan megvan a 3,7 - 4,2 V a töltöttségtől függően. Az akku kivezetésre egy kis stepup konverter, ami az 5V-ot adja a kütyünek. A power bank elsődleges funkciója a kimenet biztosítása, tehát ha a kimenet terhelve van, akkor nem tud tölteni. ( Ugyanaz az induktív kör van mindkét funkcióra. ) A hozzászólás módosítva: Nov 28, 2023
Sziasztok,
kutakodtam a neten és kicsit elbizonytalanodtam. Mielőtt bárki leszólna, inkább felvetem a dolgot, mint hogy rosszul tudjam. Sokszor volt, hogy magát tudományosnak beállító oldal butaságokat ír (ez most majd itt kiderül  ) )Egy és háromfázisú hálózatokról olvasgattam. Szembe jött ez a cikk: Why 3-Phase Power? A cikk azt írja, hogy 3-fázisú hálózaton idézem angolul Idézet: Aki nem tudna angolul, ez kb. azt jelenti, hogy az egyfázishoz képest 1.732-vel nagyobb teljesítményt tudunk szállítani.„It clearly shows that the value of electric power in a three phase system is 1.732 (value of √3) times bigger than the power transmitted in a single phase supply system.” Ugyan nem ír se fázis se vonali feszültségről, de nekem úgy tűnik keveri a két fogalmat (csillag láncolás esetén Uf=Uv/gyök(3), illetve If = Iv nemde? Vagy már csak este van nekem...
Audio note I zero erősítő (ECL82) kapcsolását keresem. Blokkvázlat is elegendő.
A hozzászólás módosítva: Nov 26, 2023
Az alábbiakat próbáltam, egy visszacsatoló hálózat tagjaiként ( tehát az osztó mindkét tagja ):
MELF preciziós ellenállások ( 1206 méretű ): Vishay Beyschlag MMA0204 ± 0.1% ± 15ppm/°C Vishay Draloric SMM0204 ± 0.1% ± 25ppm/K Welwyn WRM0204 TCR ± 15ppm/°C preciziós SMD ellenállás ( 1206 méretű ): Panasonic ERA8A ± 0.1% ± 10ppm/°K Ezek között is jelentős hangzásbeli különbséget tapasztaltam. Valamint ugyanitt furatszereltet bepróbáltam: Audio note Tantalum 1W Yageo MF0207 0,6W Más pozíciókban pl.: Allen Bradley carbon composite, Takman carbon composite, Takman fémréteg, Vishay VAR, Vishay Beyschlag, R534, stb Sokféle hifista-diyerek számára gyártott mitikus alkatrész létezik, mindenféle csodás hangi tulajdonsággal....többnyire valamilyen sajátos, ilyen-olyan hangkarakterrel Ha a - talán konszenzusosan - "legjobb" furatszerelt ellenállást keressük, akkor az egyik - műszaki szempontból is extrém jó - a Vishay VAR lehet: https://foilresistors.com/docs/63140/var.pdf A hozzászólás módosítva: Nov 26, 2023
|
Bejelentkezés
Hirdetés |