Fórum témák
» Több friss téma |
A TXB0108 automatikus irány érzékeléssel rendelkezik. Kisebbet nem kerestem.
Sziasztok!
Tudom senki sem kérdezte de azért én válaszolok.  Igazából találtam egy hasznos linket kezdőknek MikroC -hez. Led villogtatástól PWM -en át LCD kezelésig sok minden. Itt megtaláljátok.
Azért ezeket a könyveket is érdemes megnézni! Ha nem is mind, de néhányuk online (és ingyen) olvasható.
Ha ezt a programot írtam,és az RB5-ös lábat 5V-ra kötöttem,akkor RC0 nem "1" lesz?
Nem a PORTC az RCREG tartalmával lesz egyenlő, ha UARTon érkezik adat.
Oké,hogy az RCREG tartalmát írja ki a PORTC-re,de az RCREG-et nem állítja be az RB5-ös láb?
Egy kis olvasnivaló. Megfejtés: Az USART a start bitre vár.
Félreértettem a kérdésedet arra gondoltam, hogy mondjuk egy nyomógomb akar lenni az RB5-ön az RX láb valóban az RB5-ön van, ha törölted az analóg bemenetet és bemenetre állítottad és valamilyen adat érkezik akkor a PORTC = a soros adattal(RCREG).
Szerk.: És igen az RB5 "állítja be" az RCREG-et. A hozzászólás módosítva: Máj 31, 2016
Ahhoz, hogy soros adatot fogadjon, detektálnia kell egy start bitet Bővebben: Link.
Van egy sanda gyanúm, hogy a program így a while(!RCIF) résznél végtelen ciklusba kerül. Mármint ha az RB5 fixen fel van húzva. A hozzászólás módosítva: Máj 31, 2016
A start fix ideig tart?Mert én kapcsolgatom a saját sebességemmel,mégsem történik semmi.Sőt az egész nyolc bites adat küldés is?
Igen,egy kapcsoló van rajta,5V-ot és GND-t kapcsolgat.
Vagy lehet jó a kapcsolás is,meg a program is,csak lassan kapcsolgatok,és így a start után mind a 8 bit "0"?
9600-as baudon nagyjából 1ms-os sebességgel kéne nyomkodnod a gombot állítsd be 110-re és akkor egy adathossz nagyjából 90ms olyan sebességgel meg már ki tudsz hozni valamit.
De egyébként igen a start és minden adat bit ugyanolyan hosszú.
Srácok lehet butaságot kérdezek: Hogy tudok ellenállást mérni PIC-el?
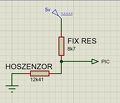
Lenne egy olyan hőszenzorom ami hőre változata az ellenállását. De nincs ötletem, hogy miképpen tudnám ezt mérni. Előre is köszi.
Ha jól emlékszem, az I=U/R képletet felhasználva megoldható a dolog. Akkora áramot kell ráengedni, hogy az elképzelhető hőmérséklettartományba kerüljön a rajta eső feszültség.
Feszosztót képezel vele, és méred a rajta (vagy másik tagon) eső feszültséget. Most így hirtelen ez jutott eszembe.
Az ellenálláson eső feszültség vagy az átfolyó áram (a kapcsolástól függően) arányos lesz (nem feltétlenül egyenesen, ill. lineárisan) a hőmérséklettel. Szükség lehet még a mért jel erősítésére, amit leginkább differenciális bemenetű (műveleti) erősítővel tehetsz meg.
A hozzászólás módosítva: Jún 1, 2016
Hőre változó ellenállások (NTC, PTC) nem lineárisan változtatják az értéküket a hőmérséklet függvényében.
Sziasztok!
Újfent kérdésem lenne, adott egy motorvezérlő elektronika és egy kézi-vezérlő. A motorvezérlő PIC-jében elszállt a program sikerült felprogramoznom a PIC-et ICSP móddal, de nem kommunikál. VERIFY-OK, kérdésem az lenne, hogy attól még lehet e PIC hibás hogy a programozás sikeres volt.
Lehet hibás a PIC, de biztos, hogy jó tartalmat égettél bele? Ha egy védett tartalmat olvastál ki, annak az eredménye csupa 0x00, amit sikeresen be lehet égetni, de nem csinál semmit.
Nem volt benne semmi mert volt egy zárlat és semmit nem tartalmazott és Skywatcher-től kaptam a HEX file-t most ki is tudom olvasni amit beleégettem csak nem kommunikál minden esetre akkor most jön a forrasztgatás mert rendeltem biztonság kedvéért PIC-et is.

Igen-igen, köszi srácok.
Van egy táblázat az ellenállás változásáról, innen kellene megoldanom a számolást, hogy automatikus legyen. Zsora: köszi.. Csatoltam egy képet, hogy oldottam meg a mérést. Jelenleg így működik, egy táblázatot készítve. De lehet jobb lenne egy számolás, ami minden frissülésnél újra számolja. Infó róla: Bővebben: Temperature Sensor 10K NTC A hozzászólás módosítva: Jún 2, 2016
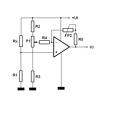
Én az alábbi elrendezésre gondoltam:
Rx a hőmérő ellenállás és a műveleti erősítő kimenetére megy az A/D átalakító.
Beépített a hőmérő a motorba, nem tudom cserélni.
Ez van, ezt kell használnom.
Ha van statisztikai számításokat tudó számológéped -vagy pc progi-, ott beviszed a táblázat adatait, és előállítja a képletet -regressziós számítás- amivel megvan a mérésadathoz tartozó érték. Nem kell nagy táblázat, ahol eleve a köztes értékek sincsenek meg.
Ha fixen a motorban van akkor viszont a PIC védelme érdekében mindenképpen figyelembe venném Zsora hozzászólását.
PIC16F sorozatnál megoldható e valamilyen trükkel, hogy megszakításból visszatéréskor ne az elugrás helyére, hanem egy általam meghatározott helyre térjen vissza ?
|
Bejelentkezés
Hirdetés |