Fórum témák
» Több friss téma |
Fórum » Léptetőmotorok (vezérlése)
Sziasztok! Szükségem lenne egy léptetőmotorra és vezérlésre csillagkövető mechanikához. Sajnos egyáltalán nem konyítok az elektronikához inkább 'könnyen' összerakható szerkezetet keresnék. A cél, hogy 3 rpm alatt legyen egy motor fordulata, de mindezt pontosan tegye, hogy hozzá méretezhessem a további áttételt. Ebben tud valaki tanácsot adni?
Ha fontos a folyamatos mozgás akkor ezt csak áttétellel lehet elérni. Vannak gyári áttételes léptetők, de az olcsók általában nem pontosak, a pontosak még drágák.
Kicsit jobban ki kellene fejteni a célt! Ha folyamatos lassú forgás kell akkor jobb egy áttételes DC motor. A léptetőnek inkább ott van jelentősége ahol az elfordulás mértékét kell szabályozni.
Köszi, lassan körvonalazódik, arduinoval oldom meg és az ócsó
 byj48 motorral + fogaskerék áttétel (22/80). A viszonylag pontos és lassú fordulatvezérlés is fontos volt. Már tekergetem, tanulom a vezérlését. Még a Nema17-en gondolkodtam, de ez is erőben, pontosságban megfelel. byj48 motorral + fogaskerék áttétel (22/80). A viszonylag pontos és lassú fordulatvezérlés is fontos volt. Már tekergetem, tanulom a vezérlését. Még a Nema17-en gondolkodtam, de ez is erőben, pontosságban megfelel.Majd lenne egy ennél összetettebb egy kamera slider, amin a kamerát is mozgatnám.
Sziasztok!
Tudna nekem felvilágosítást adni valaki a STEP/DIR rendszerű léptetőmotor vezérlőkről? EZT a vezérlőt szeretném összerakni, egy tekercselőgép szálvezetőjéhez. Nem számítógépről, hanem mikrovezérlőről történne a meghajtás. A DIR azaz Direction (forgásirány) elég egyértelmű számomra: Logikai magas és alacsony szintekre vált irányt. A STEP lábról annyit tudok, hogy impulzus bemenet. Ahány impulzust beküldök, annyi lépést tesz meg a motor (persze beállítástól függően). Egyetlen dolog nem tiszta, az pedig a motor sebessége. Mitől függ pontosan a sebesség? Mivel én PWM jelet fogok beküldeni, így tudok állítani kitöltési tényezőt, és frekvenciát. Viszont számomra nem tiszta, hogy egyetlen impulzus hossza szabja-e meg a motor sebességét, az a kitöltési tényező, vagy maga a frekvencia, tehát hogy az impulzus sorozat mennyire gyorsan zajlik le, vagy mondhatjuk azt is, hogy milyen sűrűn érkeznek impulzusok a vezérlő bemenetére? Józan paraszti ésszel, én az utóbbira szavaznék, de kérnék megerősítést egy tapasztaltabb kollégától.
Step/Dir rendszerű vezérlőknél egy ipulzus a Step bemenetre egy lépést jelent a motoron. Vezérlőtől függően változó a dolog, de van egy minimális impulzus hossz. Ha az impulzus ettől hosszabb, akkor sem fog a motor kettőt lépni. Magyarán a frekvencia adja a motor forgási sebességét.
Szia! A sebességet az egymást követő impulzusok között eltelt idő adja. Általában a lépéshez 5us hosszúságú magas szint szükséges, de ezt vezérlője válogatja, ki kell próbálni.
Hozzátenném, hogy szerintem a PWM vezérléssel pont azt veszted el amiért jó a léptetőmotor.
Köszönöm a segítséget Neked is, és Bakman kollégának is. Ezek szerint akkor jól gondoltam.
Idézet: „Hozzátenném, hogy szerintem a PWM vezérléssel pont azt veszted el amiért jó a léptetőmotor.” Ezt nem értem. Kifejtenéd bővebben? Sajnos a mikrovezérlő gyanánt más nem áll rendelkezésemre, csak a PWM. De egyébként nem szándékozom a sebességet változtatni valószínűleg, beállítom fix kitöltésre, fix frekvenciára, aztán csak a lépésszám változik huzalátmérőtől függve.
Megint csak hozzátenném, hogy nem ismerem a projekted részleteit, így lehet rosszul gondolom, de alapul véve egy bármilyen menetes orsós mozgatást, ahol tegyük fel az egyszerűség kedvéért, egy orsó fordulat 1mm elmozdulást jelent és a vezérlés mikrolépéssel történik, ezért egy motorfordulathoz 1000 step impulzusra van szükség. Így kezelhető a dolog, tudod, hogy 1mm elmozduláshoz 1000 magas jelre van szükséged a mikrovezérlő adott lábán. Szerintem ezt PWM-mel megvalósítani, nagyon melós. Manuálisan sokkal egyszerűbb: magasra állítod a lábat, várt mondjuk 1 ms-t, lehúzod alacsonyra, a sebességtől függően tartasz szünetet, majd megint jöhet a magas. Egy számlálóval tudod számolni, hogy hányszor kell magasra állítani ezzel az elmozdulást és vagy várakozással vagy timerrel tudod szabályozni a sebességet.
Idézet: „...Sajnos a mikrovezérlő gyanánt más nem áll rendelkezésemre, csak a PWM...” Nincs egy szabad digitális kimeneted??? Azzal sokkal egyszerűbb, szerintem is, mint egy PWM kimenettel. Ha PWM kimenettel csinálod, mi van akkor ha a processzor épp csinál valamit, és le kéne állítani a PWM jelet, de ezt csak később tudja elvégezni? Máris túlforgott a léptetőmotorod... Digitális kimenetet használva pedig egy ciklusban leszámolsz (az előző példánál maradva) X darab impulzust, azaz LOW/HIGH/LOW átmenetet és nincs tovább. Ezt szerintem egy sima fügvénybe is beteheted... (De majd a programozásban jártasabbak kijavítanak, ha tévednék...)
Így már értem amire gondolsz!
A fejlesztő környezetemben van beépített pwm modul. Gyakorlatilag csak meghívom, és szbadon tudok állítani frekvenciát, kitöltést. Kipróbáltam, de nem az igazi... Megcsináltam azt is, amit Te mondtál. Az már jobb. Azthiszem 250 a sebessége a motoromnak, ehhez valami 833Hz-et számoltam. Így lett 5us magas, 1195us alacsony jelem.
Napot!
A4988 vezérlő modul. A gondom az, hogy mikrolépéses üzemmódban (1/16) a Step jel újraindulásánál a léptetőmotor mindig ugrik. Nagyon úgy tűnik, hogy ha a Step jel megérkezik és/vagy megszűnik, akkor az addigi pozícióból egy egész pozícióba rúgja a motort és onnan újra kezdi a mikrolépéseket. Videó a jelenségről: YouTube. A Step bemenetre kötött függvénygenerátort kapcsolgatom (100 Hz négyszög, 50 %-os kitöltés). Valamit nem jól csinálok vagy ez ilyen? Utóbbi esetben tudna valaki ajánlani egy jól működő, low budget modult (alacsony költségvetésű szabályzásról lenne szó)? Előre is köszönöm!
Nem hiszem, hogy ilyen. Ha a szép jelet kikötöd, tartóáram van?
Nem lehet, hogy prellezik a kapcsolód, így több lépést megy kapcsoláskor?
Függvénygenerátorrol megy a négyszögjel, nincs prellezés.
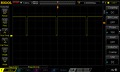
Ha a jelet invertálom egy tranzisztorral, akkor kikapcsoláskor nem ugrik el sehova, ott marad, ahol megállt. A függvénygenerátor kikapcsolt állapotban L szinten tartja a kimenetet, tehát H szinten tartva a modul bemenetét, kikapcsoláskor jól viselkedik. Bekapcsoláskor akkor nem ugrál, ha a frekvenciát feltornázom kb. 270 Hz-re. 300 Hz esetén és invertált jelnél (a szünetekben H szint van a Step bemeneten) sem ki- sem bekapcsoláskor nem ugrik. Így jár az, aki utólag böngészi az adatlapot. Mixed Decay Operation a kulcsfogalom. A mellékletben látható jelalakkal tökéletes a ki- és a bekapcsolás is, 50 Hz-es léptetőjellel. Remélhetőleg másnak is tanulságos lesz a dolog. Eddig nem kellett ilyen finom mozgatás, ezért nem jött elő a kérdés. A hozzászólás módosítva: Nov 2, 2018
Sziasztok!
Most kezdtem el foglalkozni léptető motor vezérléssel. Egy bipoláris motort szeretnék meghajtani 'H' hídon keresztül (ábra) PIC-es vezérléssel. Nem tudom foglalkoztak-e már a fórumon az alábbi problémával (nincs energiám végigolvasni 147 oldalt): Vezérlésnél egyszerre csak egy tekercspár kap áramot, az éppen nem működő tekercs a hídon-védődiódán keresztül rövidrezáródik. Ez a motornál féküzemet jelent, tehát fékezi az elfordulást.
nem vagyok egy nagy ász témában, így könnyen lehet, hogy tévedek, de a H-híd szerintem nem a legideálisabb megoldás a léptetőmotorra. Kis motor esetén 4db tranzisztor is jó megoldás, de akkor sok mindent kell a programban magadnak megoldani ami nem biztos, hogy megéri a befektetett energiát. Kisebb motorhoz tudom ajánlani a fent nemrég tárgyalt A4988-as modulokat.
Nincs ábra. Egy H-híd egy tekercshez kell, két tekercshez két H-híd fog kelleni. Fél vagy nagyobb osztású lépéseknél mindkét tekercs egyszerre kap áramot, különböző mértékben.
Bocs, a kép lemaradt, az alábbi link a 24.3 -as ábrája. A 24.2 es ábra szerint terveztem egészlépéses üzemmódban. Erre vonatkozik az előző hozzászólásom.
Link
Skiccelj egy kapcsolási rajzot, hogy mikét kötöd be a 4db tekercset, mert nekem valahogy nem tiszta.
Szia!
Lehet úgy is vezérelni a motort, ahogy írtad, de nem szokás, mert így kisebb lesz a nyomatéka a motornak. Akkor a legnagyobb a nyomaték, ha egyszerre mind a kettő tekercset vezérled. A probléma, amit felvetettél, nem teljesen érthető. Ha egyik tekercset (vagy a hivatkozott irodalom ábráit követve "tekercspár"-t) nem vezérled, akkor a híd mindegyik kapcsoló eleme kikapcsolt állapotban kellene hogy legyen. A diódákon csak akkor folyna áram, ha a tekercsben a tápfeszültségnél nagyobb feszültség indukálódna. Ez motoros üzemben kizárt, hiszen a meghajtó tekercs is erről a feszültségről működik.
" híd mindegyik kapcsoló eleme kikapcsolt állapotban kellene hogy legyen"
Igazad van. Először úgy gondoltam, hogy ha digitálisan (PIC-ről) vezérlem, akkor valamelyik tranzisztor mindig nyitva van, de valóban megoldható egy harmadik állapot is, hogy egyik sem legyen nyitva. Azt viszont nem értem, ha az ábrán feltüntetett típusú motorom van, akkor milyen irányú áramot kapcsoljak a nem használt tekercsre.
Ha úgy használod, mint a mellékelt ábrán van, akkor feszültség-generátoros a meghajtásod, azaz hol nulla, hol meg valamilyen előjelű tápfeszültséget kapcsolsz a tekercsekre.
A nulla feszültség valóban rövidre zárja a nem vezérelt tekercset, és a forgórész mozgása áramot tud indukálni benne. Ez egyrészt gond lehet, mert valóban fékezi a forgórészt. Másrészt előny is lehet, hogy a lépesek között a forgórész lengését mérsékeli, csillapítja. A fenti nem kézben tartott állapotok miatt helyesebb a léptető motorok áramvezérlése, mikro-lépésekben, közel szinuszos lefolyással. Persze ha az igényeket kielégíti az egyszerűbb megoldás, akkor azt is lehet választani.
Köszi a választ. A kazánom huzatszabályzó ajtaját akarom vele nyitni-zárni, ehhez elég lesz ez az egyszerűbb megoldás.
Sziasztok! Egy nagyon amatőr kérdésem lenne. Van egy nema11-es léptetőmotor, aminek a névleges feszültsége 4,44V. DRV8825-ös vezérlővel használnám, ami 12V-ot kapna. Használhatom így?
Azt látom, hogy a legtöbb használt léptetőmotor névleges feszültsége elég kicsi az alkalmazott tápegységhez viszonyítva. Tulajdonképpen mit adnak meg névleges feszültség alatt a léptetőmotoroknál? Köszönöm a választ!
Használhatod, azért motorvezérlô mert tudja mit csinál. Az áram a lényeg, ha nincs a motoron feltüntetve, mérd meg és számold ki mekkora lehet az áram, és azt be lehet állítani a vezérlô icipici potijával. De ez a poti elég hamar meghal, szóval óvatosan.
Teljesen nem tudom a választ a kérdésedre, de biztosan használhatod 12V-ról, csak az áramot állítsd be rendesen.
Köszönöm!
Nálamsokkaltöbbettudok! Segítségre lenne szükségem. Sikerült hozzájutnom Németországból egy sokat érő fogászati nagyfelbontású szkennerhez, tudtam, hogy jutányos áron csak úgy jutok hozzá, ha nyűgje van. A gyártó szupportjával odáig sikerült eljutnunk táveléréssel, hogy életre kelt, és egy dolog nem műkszik rajta, az 4 mozgató stepperből a main axist meghajtó az alábbi hangot adja ki magából és nem is mozog. Lenti video
Szétbontottam a szkennert, ugyanúgy mint a nyomtatónak van egy vezérlő bordja, külön board a léptető motor vezérlő, Sajna az egy integrált board, mind a 4 tengely egy vezérlő kártyáról van vezérelve. megtaláltam a hibás stepper 4 vezérlő kábelét, kihoztam a szkennerből és rákötöttem egy külső motorra, és ugyanezt a hangot kapom. Van-e tapasztalata valakinek, hogy ez a hang mikor képződik, ha a step, vagy a dir nem jön létre? Ha a végállás kapcsolót kézzel kapcsolom, akkor megáll a hang, tehát az jó! A közbenső időben fog a stepper fék, mint a bika. a 2. képena 4 motorvezérlőt egybefogó kártya. 1. Van-e ötletetek, milyen hiba adhatja ezt a hangot? 2. van-e köztünk olyan, aki bevállal ilyen lépésvezérlő javítását? 3. Tudtok-e ajánlani olyan elektroműszerészt, aki javít ilyet? Szóval a játék elkezdődött! Segítségeteket előre is köszönöm!
1: Sok oka lehet. Legjobb lenne ránézni oszcilloszkóppal, milyen jeleket kap a vezérlő és a motor.
2: Talán, a 3. ponttól függ. 3: Hol?
Egy másik fórumon egy kolléga azt állítja, hogy a mikrolépések számának emelkedésével egyre csökken a léptetőmotor nyomatéka. Ez valóban így van? Nekem tűnik túl logikusnak.
|
Bejelentkezés
Hirdetés |