Fórum témák
» Több friss téma |
Fórum » Léptetőmotorok (vezérlése)
Ez csak akkor igaz ha nagyon magas frekiről beszélünk és feszültséggenerátoros a meghajtás. De lehet csinálni és vannak is magasabb feszültséggel működő áramgenerátoros meghajtások azoknál ez egyáltalán nem igaz. Ott végig konstans a nyomaték még jóval magasabb frekvencián is.
A hozzászólás módosítva: Jan 6, 2019
Valószínű a kollégának csak sima feszgenerátoros a vezérlője de attól még az állítás csak az ő rendszerére érvényes, ez nem mindenhol van úgy.
A hozzászólás módosítva: Jan 6, 2019
Azt honnan lehet tudni, hogy milyen a vezérlő? Mondjuk egy DM556d?
Ha az áramot szabályozza akkkor igen olyan lehet. Ha duplájára emeled a tápfeszt azzal a max fordulatot is emelkedik míg nem csökken a nyomaték.
Ez használják ki az egész magas feszültéséggel működő léptető vezérlők. Vannak amik pl hálózati feszről üzemelnek és 100-150-200V kimeneti fesszel. Idézet: De ezt honnan lehet tudni? A leírásában én ilyet nem láttam. „Ha az áramot szabályozza akkkor igen olyan lehet.”
Szerintem nem pontosan idézted a kollégát. A mondat úgy lehet igaz, hogy a mikrolépések számának az emelésével az adott pozícióban tartáshoz tartozó nyomaték egyre csökken. Azaz az adott mikrolépésből a lépések számának emelésével egyre kisebb nyomatékkal kimozdítható, és valamekkora hibával áll meg. A tartónyomaték csökkenésének a nagyságát például ebben a cikkben is megtalálod a 3. oldal tetején egy táblázatban. Bővebben: Link
A statikusan létrehozható maximális nyomaték a szinkronmotor jellegből fakadóan a terhelés mentes pozícióhoz képest a teljes lépésre vonatkoztatott +-90°-os pozíciójához tartozik. Ez mikrolépésben több tucat lépéssel való elmaradást vagy előresietést jelenthet, míg a teljes lépéses vezérlés esetén még akkor is a lépésen belül marad.
Köszönöm szépen a kimerítő választ és a hasznos olvasmányt!
Egy kis floppymeghajtóból szedtem ki egy motort. Bipoláris léptetőnek gondolom.
Szeretném arduinoval vezérelni, de nem tudom milyen sorrendben kapcsoljak a kivezetésekre jelet, mekkorát és mennyi ideig, hogy szépen forogjon. Kipróbáltam és nagyon melegedett a programmal amit írtam rá. Mekkora feszültséget adjak neki 5 V az elegendő?
Ebben a videóban: YouTube, érthetően elmagyarázzák, hogyan működnek a léptető motorok. A te motorodhoz két H híd kell vagy olyan vezérlő, aminek van két H hidas kimenete (pl. A4988).
Az szinte biztos, hogy sok a motornak az 5 V. Mérd meg a tekercsek ellenállását és kezdésként dupla értékű ellenállásokat köss sorba egy-egy tekerccsel. Ha nem forog, akkor lehet lejjebb menni az ellenállás értékekkel. Nevezett A4988-as vezérlőben be lehet állítani az áramot, ott nem kell vacakolni ellenállásokkal. Ha a motor jól lépked és nem is melegszik, akkor kb. jól van beállítva az áram.
Köszönöm! Megvettem a vezérlőt és Arduino-ról már működik is. A megtalált összeállításokban a Reset és a Slip össze van kötve, ez miért erre nem jöttem rá, a féllépeses módhoz az MS1-re elegendő egyszer HIGH jelet küldeni vagy folyamatosan azon kell tartani?
Sziasztok.
Kis segitség kellene. Fotózáshoz szeretnék egy timelapse slidert. Aminek a lényege, hogy egy kb. 500 vagy 1000mm es sinen, egy motor mozgat egy "kocsit", amin pl egy kamera, vagy a telefon van. Szóval nem nagy tömeg, max 3-400gram. A meghajtás (motor, vezérlő) érdekelne, hogy hogyan lehetne a legegyszerübben megoldani.? Itt gyakorlatilag ami lényeges tényező, és amit tunia kell. Max.12V vagy kevesebb tápfesz a mobilitás miatt. Potival állitható sebesség, min. 2rpm től. Igaz ez a szijjtárcsa méretével még változtatható. Pl. az 1m es távolságot, legkisebb sebességen legalább 60 perc alatt tegye meg. Ha a végére ér, kapcsoljon le, vagy induljon el visszafelé. Ebből adódik, hogy az irányváltás is kell. Szóval, szerintetek melyik erre a megfelelő? Léptetó vagy dc motor? Én ugy gondolom, léptető. Esetleg hajtóműves dc. Biztos ismeritek, ebay és Aliexpressen vannak ezek a kész stepper motor speed controllerek pár ezer ft ért. Te mit javasolnàl? Mi lenne a kegolcsóbb és legegyszerűbb? Másik cnc s fórumon is kérdeztem ezt, annyira túl lett bonyolitva a válasz, (meg 20ezerért legyártják ami kell) hogy inkább töröltem is. Videon látni mit szeretnék, sem több sem kevesebb, nem akarom túlbonyolitani, Aliról megrendelem én csak tudnom kellene mit. Motor (bipoláris kell?) speed kontroller (elég egy ilyen magában, vagy kell egy driver is pl egy TB6600). Mechanikát megoldom. Előre is köszi. Itt egy minta. slider A hozzászólás módosítva: Feb 3, 2019
Szia. Én úgy látom, hogy a bipoláris meghajtású sokkal több lehetőség van. Egy ilyen alkalmazásra a TB6600 nekem "ágyúval verébre"... Egy kisebb léptető, ami kb 1,5A-t kér, hozzá egy A4988 egy valamilyen egyszerű mikrokontrolleres vezérléssel. Minél kisebb szíjkereket teszel rá, annál kisebb sebességgel tud folyamatosan haladni. Kérdés lehet még az hogy a végállásokat akarod-e figyelni?
Igen a végállás mint irtam, kellene. Ha végére ér megáll.
Csináltam már jó sok mindent, de ebben a léptetőmotoros dologban nem vagyok otthon. Ezért kérdezlek titeket. Ezt a motort néztem ki. motor És ezt. motor2 Controllert meg ezt. speed És ezt. speed2 Viszont azt nem tudom hogy ezekhez jell e még valami driver pl tb6600, vagy közvetlenül csak motor, táp, és a 2 közül valamelyik.?? Ha ezekkel a kész nodulokkal nem lehet megoldani, nem szeretnék különféle arduino, pic, nyákgyártással foglalkozni. Azért gondoltam ezekre, hogy megrendelem összerakom és működik. Ez nem cnc, hogy mindennnek űber pontosnak, meg csúcsszupernek kell lennie. Szóval ezek közül valami megfelelne nekem? Vagy bármi más, készen kapható, vezérlő+motor elérhetősége is jöhet. A hozzászólás módosítva: Feb 3, 2019
Motor, A4988 meghajtó és egy, a számodra éppen megfelelő vezérlés. Utóbbihoz kell kb. egy kontroller és egy kijelző, pár gomb, végállás kapcsolók. A többi már csak mechanika.
A motorból inkább a második mert 0,9°-os a lépésköze. A vezérlő meg az első, ha jól látom az tud mindent ami neked kell, rajta van az A4988-is, csak táp kell neki.
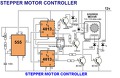
Szerintem ilyen feladatra az alábbi áramkör is megteszi. A végálláskapcsolókat a középen található irànyvàltó kapcsolóval összehozod, megvan az automata visszafordítás is.
Azon gondolkodj el hogy a fotózást mennyire zavarja egy darabosan mozgó léptetőmotor, még ha mikrolépésben megy is...
Ezeket timelapse videókra használják. Fotókat készít pl. 3, 4, vagy 10 másodpercenként, majd ezekből lesz a videó. De gondolom nem annyira darabos a mozgása hogy ez zavarna. Esetleg gyorsabb fordulaton menne a motor, és a bordásszij tárcsa méretével l lehet lassitani.
Az igazi megoldás az lenne, ha a vezérlő léptetné a motort pl. 10 lépéssel, megvárná, amíg letelik a beállított idő, exponálna, aztán kezdené elöröl az egészet. Így biztos, hogy nem akkor exponálna a kamera, amikor éppen mozgásban van a szán.
Sziasztok!
Szeretném megkérdezni, hogy hogyan lehetne stabilabbá tenni a léptetőmotor működését. ULN2003-as IC-vel működtetek egy unipoláris motort. Sajnos már három IC is tönkre ment mikor a motor által hajtott eszköz egy kis időre (kb. 1-2 s) megszorult. Arra gondoltam, hogy lecserélem egy L298-as meghajtóra (a négy motorkimenetet kötném a meghajtó kimenetére a közös szálra pedig GND-t és HIGH jellel menne a léptetés) hátha ez segítene elkerülni a meghibásodást. Lenne-e jobb megoldás?
Szia!
Ha jól van méretezve a motor és a vezérlő, és a kikapcsoláskor keletkező túlfeszültség is kezelve van, akkor nem szabadna a meghajtó IC-nek tönkre mennie. Ahhoz, hogy megtaláljuk a hibát, kellene a kapcsolás, a tápfeszültség nagysága, és a léptető motor adatai (legalább a dc tekercs ellenállás). Ha erősebb meghajtást akarsz unipolárisan, akkor inkább 4db fetet, vagy bipoláris tranzisztort (esetleg darlingtont) kellene használni. Ha valamilyen komplett mikrólépéses meghajtót használnál, az is sok problémát megoldana az áramgenerátoros meghajtásával.
A4988 -as vezérlőn beállítod az áramot. Ha nem túl magas az érték, a motor akár teljesen meg is szorulhat, nem lesz a vezérlőnek semmi baja.
Szia!
Idézet: „ULN2003-as IC-vel működtetek egy unipoláris motort.” Nem biztos, hogy beköthető bipoláris üzemmódra.
Ha egy DRV8825 vezérlőt összekötök egy NE555-el készült step generátorral akkor ennek működnie kell? Mert ha a shieldbe dugom akkor megy az 555-el. Kap 20 Volt motor feszt. Fault nincs bekötve, Enable testen, M0 M1 M2 testen, reset, sleep össze kötve. Dir 5 Volt, stepre az 555 3-as lába. Motor nem forog, ami jól van bekötve mert a shildel meg. Az áramkorlátot sem tudom beállítani, a kis trimeren feszültség nem mérhető. Van ötletetek?
Nem egészen az enable testen, a reset és a sleep re nincs 5 volt, csak egymással vannak összekötve.
Mit jelent és hogyan kell használni a töredékfordulatok törlését. Mikor törölni akarom az addigi töredéklépést akkor a valamelyik csapra adok egy HIGH jelet egy kis időre?
Az előzőhöz kapcsolódva merült még egy kérdés fel. Mikor kell az Enable kivezetésre HIGH jelet adni?
|
Bejelentkezés
Hirdetés |