Fórum témák
» Több friss téma |
Szia!
Nem adtad meg a címet, hová küldjük..  Azért, mert nincs sárga topik-fejléc, bevezető, még ideírhatnád, mégis miféle motor... volt, amper, watt, DC-nél hol indul meg kb. terheléssel, meg ilyenek.
Ha jól értem, megnövelted a tárcsa felbontását, a gyakoribb mérés érdekében. Ez mindenképpen jó.
A számítási eljárásod továbra is alapvetően integráló. Ez sose lesz jó. Ha el akarsz térni attól, amit korábban felirtam (PI szabályozás), akkor próbáld ki először a sima arányosat: pwm= hiba*Kp Itt az előző pwm értéket sohasem használjuk fel. Ha sikrül Kp értékét 100 körülire felvinni, akkor kb. 1%_os hibával fog menni a motor. De már 16 vagy 32 (elég csak siftelni) Kp értéknél is nagyjából követni fogja az alapjelet, és a lengési problémáid szerintem meg fognak szünni. Persze a PI lenne az igazi.
Tegnap esete nem tudtam megnézni az Excel táblázatot, csak ma reggel. Ez egy szimulációs kísérlet volna, ami nekem szándékában nagyon tetszik. Sajnos van egy nagy gyengesége, a motor modellezése, illetve nem modellezése. A fordulatszám nálad a kimenő feszültséggel egyenesen arányos. Ez azért nagyon durva megközelítés. Legalább egy ellenállással illene figyelembe venni a motor impedanciáit. A korrektebb lenne, ha a motor RLC körös helyettesítő képét használnád (R armatúra köri ohmos impedancia (0,1-1 ohm), L armatúra köri induktivitás (1-100mH), C belső feszültség, a motor mechanikai időállandóját is magában foglalva (1000-100000uF), a beírt értékek az olyan kis motorokra tett becsléseim, mint ami neked is van). Tudom, hogy ekkor már a kialakuló áramokkal is számolni kell, azaz jóval bonyolultabb az algoritmus, de megérné. A fordulatszám a belső feszültséggel arányos, azt kellene a táblázat D oszlopába visszaírnod.
A számolásod azt tükrözi amit írtál, és jól mutatja a hibákat. Az arányos tag kb. úgy néz ki ahogy kell, a hibát előjelesen mutatja, ahogy a sebesség beáll, egyre kisebb értékű. Az integráló tag és a többi számolása viszont nem jó. A táblázat második részét kijavítottam olyanra, amit múltkor írtam. A paraméterek némi módosítgatása után láthatod milyen felfutást produkál. Azonban ez továbbra is önámítás, mivel a motor valós modellezése nélkül pusztán azt tükrözi, hogy ilyen mintavételezési gyakorisággal milyen gyorsan tud beállni a szabályzó.
Lehet én kavarodtam bele, de a PID a beavatkozás mértékét adja meg, nem a PWM értéket. Valami hasonlóra gondoltam. mint az AN899-ben.
Az excelbe betettem egy arányszámot, ami szimulálhatja a motor gyorsulását. Az jól látszik, hogy az egész nagyban függ a motortól. Utólag olvasom a hozzászólásod , még emésztem. Pár hete rágom csak ezt a témát, nem érzem teljesen életcélnak a motorok modellezését, inkább arra gondoltam csináljunk egy egyszerű, könnyen módosítható programot, ahol néhány paraméter beállításával megszülethet egy megoldás. A hozzászólás módosítva: Márc 7, 2015
Üdv!
Nagyon szépen köszönöm amegoldásokat! Abban a tévhitben éltem, hogy egy 555-el és egy rc taggal megoldható. Valószínűleg pic, vagy avr-es megoldás lesz. Így a direktbe kapcsolás is könnyen megoldható. Köszönöm a munkátokat! Norbert
A Microchip blokkvázlatát átfutva már értem, hogy miért számoltál úgy ahogy. Szerintem nem jó az az algoritmus. A BLDC motorokhoz is a kefés motoroknál bevált szabályozási köröket kell használni. A linken találhatsz egy irodalmat, amiben a 10. oldalon a szervó motorokról van szó. Ott is ugyan az a szabályozási struktúra van felvázolva.
Bővebben: Link Nem muszáj a motort lemodellezni, de ha megteszed, akkor sokkal egyszerűbben próbálkozhatsz a különféle algoritmusokkal. Nem szeretném elvenni a kedved, de szerintem nincs igazán járható út az alárendelt áramszabályozós fordulatszám szabályozáson kívül. Viszonylag egyszerű (áram szab. + a ford. szab. 2 + 2 paraméter), stabil, a leggyorsabbra optimalizálható. A szabályzó gyártók úgy igyekszenek felhasználó baráttá tenni, hogy a készülékeknek van önoptimalizációs funkciója, azaz beállítja saját magát. Akkor már a felhasználót nem is annyira érdekli, mi is történik a szabályzóban, melyik paraméter mire való.
Most már legalább értem amit az AN-ekben irogatnat
. Az egyikben találtam:Idézet: „The motor responds to a PWM output stage by time averaging the duty cycle of the output. Most motors react slowly, having an electrical time constant of 0.5 ms or more and a mechanical time constant of 20.0 ms or more. A 15 kHz PWM output is effectively equivalent to that of a linear amplifier.” Nem tudom ez ebben a mérettartományban mennyire általános, de ez alapján átírtam a programot. Most kb. 2ms-onként számítgat, és úgy is mér. Az algoritmust is kinéztem onnan, szerintem megfelelő lesz.
A dc motorok leírásakor kettő időállandót emelhetünk ki: a villamos időállandót és az elektomechanikai időállandót. Az áramszabályzó kör felirásakor a villamos időállandója lesz a fontos, a fordulatszámszabályzókör szempontjából az elektromechanikus időállandó. Ezekhez képest kell olyan gyakran lefutni a szabályzó köröknek, hogy úgy viselkedjenek, mint egy lineáris szabályzó. Ez célszerűen egy nagyságrenddel nagyobb lefuttatási frekvenciát jelent.
A Microchip doksijában kb. ugyanaz van, mint ami korábban írtam. A dc motor rlc modeljében az rl időállandó a villamos időállandót. Azokból az értékekből visszaszámolva, 0,1...100ms tartományt adtam meg. Ez alapján az áramszabályzó kör algoritmusát több 10kHz-es frekvenciával illene lefuttatni. Erre írtam, hogy ennek belepakolása egy 8 bites PIC-be kérdéses lehet. Illetve ez azt is jelenti, -amit a doksi is ír- hogy ilyen nagyságrendű PWM jel már gyakorlatilag lineáris beavatkozás lesz. Az elektromechanikai időállandó egy nagyságrenddel nagyobb szokott lenni (rlc modelben a C tag határozza meg elsősorban). Ezért a fordulatszámszabályzókör lefuttatása elegendő kHz-es nagyságrendben. Ha most csak 2ms-ekenként futja az erőforrásokból (500Hz), az sem lesz tragédia, így is 50-szer gyorsabb lesz, mint a 100msec, ahol kezdted. Fontos, hogy ezzel egyidejűleg a fordulatszám mérésének sávszélessége is emelkedjen, ahogy írtad is.
Sziasztok!
Egy kis segítsségre lenne szükségem PWM szabályzó építéséhez! Nem a PWM rész okoz gondot, hanem a teljesítmény. A motor 36V 3KW Milyen fetekkel, hogyan lehet ekkora teljesítményt kezelni? Forgásirányváltás nem kell, csak hajtás.
Szia!
Ez egy egyenáramú kefés motor?
Igen. Az adattábláján az áll, 36V 86A
Van itt egy jó kis végfok. A FET-ek számának növelésével a maximális teljesítményt tovább fokozhatod.
Sziasztok, 3 motor vezérléséhez kell pwm-et használnom egy atmega48 uc-n. 2db egyforma DC motor, ezek mehetnének egy timerről csak a kitöltési tényzőt kell változtatnom, ha eltérő sebességen akarom járatni őket és egy servo. Ha jól sejtem 2 timer fog kelleni hozzá, egy a dcmotoroknak és egy a servonak. A 6 PWM láb közül 2 már ki lett lőve, más használja, de nem PWM megy rajtuk, szóval timer még nem lett elfüstölve. Ami maradt: PB1(OC1A) PD6(OC0A) PD5(OC0B) PD3(OC2B). Ezek közül melyik hármat érdemes választanom? Melyikek mennek egy timerről?
Sziasztok!
Meg tudná valaki mondani, hogy miben külömbözik felhasználhatóság terén a POWER MOSFET driver és a MOSFET driver ha mindkettő max. 18V-ot és 1,5A-t tud? Azt adatlapból tudom, hogy az egyiknek fetes, a másiknak tranzisztoros a kimenete, csak azt nem tudom, hogy ez egy POWERFET-et mennyiben befolyásol.
Az előállítási technológiában különböznek. A közönséges MOSFET -ben csak egy tranzisztor van, míg a POWERMOSFET -ben sok kicsi párhuzamosan, persze egy lapkán kivitelezve. Gyakorlatilag egy integrált áramkör. Ettől sokkal strapabíróbb, de drágább is.
Szia!
A nevekből látszódik, hogy melyik pwm jel melyik timerhez tartozik. Tehát a 3. karakteren lévő sorszám. Azt nem tudom megmondani, hogy melyiket érdemes választanod. A legnagyobb különbség az időzítések finomságában. A Timer0 a legegyszerűbb, 8 bites és szegényesebb előosztóval bír. A Timer1 1 bites, bár Timer0-hoz hasonló előosztóval bír. Viszont kvázi 1:65535-ös arányú pwm jelet is ki bírsz csiholni így. A Timer2 szintén 8 bites, de kicsit több fél előosztója van, így abban válogathatsz. Szóval át kell rágnod, hogy milyen frekivel akarod meghajtani a motorokat, milyen arányokat akarsz beállítani. Aztán pedig valamit ki kell választanod. Egyébként szerintem az Atmel leírás teljesen egyértelműen fogalmaz, javaslom, tanulmányozd azt előbb még. Én modell hajóban egyébként Timer0-t használom a motor vezérléséhez kb. 4kHz-es pwm frekivel, még Timer1 a távirányító jelének pontos mérését szolgálja. Üdv!
Szia!
Ha a tápfesz megfelelő, akkor bármelyik meghajtó megbirkózik az nFET-tel. Üdv!
Szia, köszönöm a segítséget. Végül a Timer0-t választottam PD5 és PD6 lábakon. Most 4kHz-es pwm frekivel próbáltam, de hangja van a motoroknak (sípol) ezért leveszem a prescalert, így 32kHz-en elvileg már nem lesz hangja. Hadd kérdezzem meg, milyen motort tettél a hajóba? Én egy RS555 12V-os 6000RPM mocit néztem ki, ezt elvileg áttétel nélkül direktbe köthetem a tönkcsőre. Egy ILYEN gondolom kevés lenne.
A hozzászólás módosítva: Márc 23, 2015
A pwm frekvencia növelésével figyelj majd a meghajtó IC hőmérsékletére a tesztek során. De szerintem nem lesz vele probléma.
Hogy milyen motort raktam a hajókba? Nagyon sok típus volt már. Volt olyasmi is, amit használni szeretnél, de volt nagyobb teljesítményű is. Az egyik legnagyobb teljesítmény valami kínai motor vette fel, ami 50-es fsr csavarral 30A-t kapott ki a 12V-os akkuból. Ez túltett a robbe 700-as motoron. De nekem a hajók méretéből és felhasználásából adódóan jobban tetszettek a bontókból beszerezhető autó vízhűtők ventilátor motorok (pl. Audi vagy VW). Ezek ténylegesen alacsony fordulatúak és nagy nyomatékkal bíróak.Azt nem tudom, hogy milyen hajót akarsz ezzel a motorral meghajtani és milyen csavart, de én nagyobbat keresnék. (Legalább ami bírja az 5-6A-t) Ha erről akarsz esetleg beszélni, akkor az rcmodell fórumon keresd meg Blaskó Jánost és őt faggasd ki. Vagy ott is megtalálsz engem. Itt most ne untassuk a többieket az alkalmas motorokkal. Inkább maradjunk az izgalmasabb meghajtásoknál, szabályozásoknál.
Üdv.
PWM vezérléshez szeretnék MOSFET-et használni. Hogy nagyobb fogyasztót tudjak vele vezérelni mint amennyit a MOSFET biztonságosan tud akkor csak többet kell párhuzamosan kötni? Köszi.
Igen elméletileg ennyi elég, de ha van áramfigyelés akkor a teljesítmény ellenállást is át kell számolni.
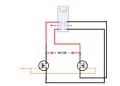
Sziasztok, adott a képen látható relés kapcsolás (móricka rajz), a kérdés hogy ezen hogyan kell a diódákat a motorra kötni? Amíg egy irányban forgott csak a motor addig a motorral párhuzamosan a negatív lábtól a pozitív felé mutató dióda kellett. Most hogy 2 irányba is foroghat hova kellenek a diódák?
Csak egy FET kell. A motor a morze középsőre megy, az alsó-felső a táp és drain, a másik oldalon fordítva. A dióda mindig a +12V és a drain között van.
A hozzászólás módosítva: Ápr 9, 2015
Ezt még emésztenem kell hogyan lehet egy FET-tel megoldani. A kapcsolás amugy egy H-híd féleség akar lenni N-channel low side FET-ekkel viszont a high side P-channel FET-ek helyett egy relé kapcsolgatja a tápot (és persze vele együtt a földet az átlós N FET-re). Így 1db pwm jellel állíthatom a sebességet mindkét forgásirányban mert egyszerre csak egyik FET fog földet kapni.
Már értem amit írtál, késő van... Jó ötlet köszi!

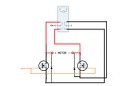
Én így szoktam megoldani. A FET mellé nem kell külön dióda, a legtöbb típusban belül van.
A hozzászólás módosítva: Ápr 10, 2015
|
Bejelentkezés
Hirdetés |