Fórum témák
» Több friss téma |
Sziasztok
Egy remélem egyszerű kapcsolást kellene összehozni aminek egy bemenete van és két kimenete. Ha a bemenetére +10V és -10V között szabályatalanul ingadozó feszültséget (ez a szervomotor vezérlőfeszültsége) kapcsolunk akkor az egyik kimenetén a bemenő feszültség abszolutértéke jelenik meg, (tehát a bemenő feszültséggel arányos 0 és +10V közötti feszültség), valamint ha a bemenő fesz negatív akkor a másik kimenetét a földre kapcsolja. Előre is köszönöm a segítséget.
Egyik kimenet relatíve egyszerűen diódákkal megvalósítható (persze a 0,6V-os feszültség eséssel számolnod kell)
A másik már egy kicsit bonyolultabb feladat. Itt én olyanra gondoltam, hogy egy feszültség osztó, és egy komparátor módú műverősítő lesz a Te barátod. Emellé még egy NPN tranyó. Üdv. Topi.
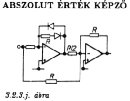
Egyetértek, vagyis az egyszerűbb megoldás egy graetz híd Schottky diódákból, a 10V hoz képest az azokon eső 0,3V talán még belefér. Ha nem akkor egy OPA-s megoldás, egy "abszolút érték képző" (egyenirányító?
 ) A másik kimenetre egy null detektor lehetne, ennek a kimenete -nál -táp, +-on +táp s a nullánál vált. Az egyenirányítóhoz adnék alkatrészértékeket, ha ez szimpatikusabb, mint a graetz... ) A másik kimenetre egy null detektor lehetne, ennek a kimenete -nál -táp, +-on +táp s a nullánál vált. Az egyenirányítóhoz adnék alkatrészértékeket, ha ez szimpatikusabb, mint a graetz...
Sajnos még a 0,3V-os eltérés sem fér bele, az egy 6000-es fordszámú motornál 180 1/s fordulatkülömbség.
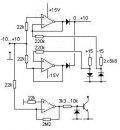
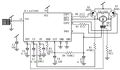
Jól gondolom, hogy akkor a csatolt rajz a megfelelő? Ahoz viszont tényleg kellene, hogy mi micsoda.
Megpróbálhatod ezt a rajzot is, tesztelve nincs.
Egy négyes OPA elég.
Köszi, ki fogom próbálni. Bocs anyira nem vagyok ott ezekben a dolgokban, mi az az OPA?
Asszem rájöttem: műveleti erősítő angol rövidítése?
Akkor a negyediket föl lehetne használni a nulldetektorhoz?
Az alsó lenne az, ami negatív bemenő esetén a tranyó segítségével 0-ra húz le valamit ( amit nem írtál meg...).
A negyedik erősítő nem kell... de ha találsz hármast, az is jó.
lenne még egy kérdésem.
Lehet olyan műveleti erősítővel helyettesíteni a kapcsolást amit nem +-15V-al kell táplánli, hanem föld és + 15V-al?
Heló.
Kicsit hosszú lesz,bocsi . Vettem 20 darab rc szervót egy robothoz .Nagyon olcsó,nagyon erős, de pontatlan. Ugyanis a sima standard szervóval ellentétben ,ennek van holtjátéka ,de nem mechanikusan ,hanem az elektronika csal kb. 5-6 fokot . Aminek az a hátránya ,hogy mikor a robot állni próbál ,a holtjáték miatt nem feszít időben a szervó ,és felborul ,mivel nem tud egyensúlyban maradni ,ez hatványozódik ,mert egy lábában 5 darab ilyen szervó van . Szóval a szervóban van egy potméter ,ami forog a tengellyel együtt,ha alaphelyzetben meglököm a robotot ,akkor elfordul a tengely, vele együtt a poti ,és így megmozdítja a motort ellentétes irányban, magyarán megfeszíti a szervót . Na ez nem feszít azonnal ,csak 5-6 fok elmozdulás után ,de már akkor késő ,mert elesett Robi .A poti nem lötyög,nem kotyog ,az elektronika ilyen silány minőségű . Szóval a kérdésem az lenne ,hogy van -e valakinek ötlete ,mit lehetne módosítani az elektronikán , ami egy KC2462 által hajtott kis panel . ...valamit kicserélni,vagy átkötni,hogy feszüljön a szervó áram alatt . Egy normális szervót ,ha megpróbálok megmozdítani jobb-bal irányban ,azonnal ellen dolgozik, 0 fok alatt , tehát nem tudom elcsavarni a tengelyét . köszi a segítséget . üdv.
Ha valoban a poti forog ( amit kétlek, mert az be van forrasztva), akkor azt kéne rendbe tenned nem az elektronikát piszkálni. Inkább mechanikai holtjáték tipikus ilyen olcso szervoknál - azzal nem igen lehet mit kezdeni a cserén kivül.
Nekem is sikerült egyszer ilyen szervokat vennem, mindnek volt holtjátéka. 
Köszi.akkor máshogy mondom. Szóval a szervo szétszedve,a poti a kezemben van,eltekerem jobbra, a motor jobra fordul, balra tekerem balra fordul.ez így eddig ok . Vadi új, nem lötyög semmi, viszont az elektronika csak nagyobb elmozdulásra indítja a motort ,próbáltam más gyártó potijával, de u. az .
Tehát a poti ami egyébként 2K ,hibátlan , csak gondoltam van itt olyan ember aki ránéz erre a rajzra és azt mondja, hogy pl. Ide meg ide kell 2 darab ellenállás , vagy akármi, és "feszít" vagy érzékenyebbé teszi a szervót . Kicseréltem a panelt, egy kis 3kg -os műanyagszervóban volt, és azzal hibátlan ,nincs "holtjáték" . De sajnos ez nem megoldás hosszú távra...és nincs is húsz darab... Egyébként sokan panaszkodnak az ilyen vagy ehhez hasonló szervókra, és ez akár egy új reform átalakítás lehetne ... aki ért az elektronikához kérem nézze át a rajzot,hátha van megoldás . Köszönöm .
Abbol az elektronikábol meg a potiból mást aligha lehet kihozni ( az áruk is csak 0,5 dollár) mit vársz tölük?
Köszi .
más valaki ?
Heló!
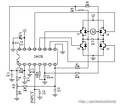
Ha az adatlapját végigolvasod, akkor abból kiderül, hogy a 3-as lábra csatlakozó CDB kondenzátorral állítják be a deadtime-t. Ez a deadtime nem azonos azzal, amit a kimenő fokozatoknál a fetek egymásra kapcsolásának megakadályozására beiktatnak, hanem az előírt impulzus-szélesség (ami bejön a 4-es lábon) és a one-shot áramkör (aminek idejét a potméter szabja meg) között mekkora különbséget vegyen hibának. Ha ez túl kicsi, akkor állandóan dolgozik a szervo, mert minden kis zajból fakadó eltérést hibának fog látni. Ha túl nagy, akkor meg az van, amire te panaszkodsz, hogy csak nagy elmozdulásokra reagál, ráadásul nem is pontosan. Szóval én a helyedben megpróbálnám a nyákon lévő kapcsolást nagyjából visszafejteni, mennyire egyezik azzal a rajzzal, amit az adatlapból kimásoltál, és a konkrét értékeket is visszamérném. Ha látod hogy mi van, akkor a 3-as lábon lévő kondenzátorral lehet játszani. Megjegyzem, hogy ezek az olcsó szervók elég érzékenyek szoktak lenni a táp szűrésére, amit meg sokszor elspórolnak. Érdemes egy 10-20µF kerámiakondit és egy 470-1000µF ESR elkót a nyakukra tenni.
Huuh
köszönöm szépen a kimerítő választ ,még értem is . Végre Valaki aki megérti a problémát Ki fogom próbálni . A robot akksiról megy , 7.2V,3800Ah ,így a szűréssel nincs gond. Köszi mégegyszer .
Már csak egy kérdésem van...
Most szétszedtem egy másikat , abban pedig AA51880 a vezérlő . hihetetlen de igaz ,pedig egyszerre vettem ,egy helyről ...mindegy vegyesen van . szóval ennek melyik lábán próbálgassam a kondi cserét , ha a 2462- n a 3 láb ? előre is köszönöm .
Ha az adatlapját megkeresed, és átolvasod, megtalálod, hogy a 11-es lábra, az Rdb-re csatlakoztatott ellenállással lehet ennél az IC-nél a deadtime-t beállítani.
Az aksi nagyon hosszú vezetékkel van bekötve ahhoz képest, ami a zavarszűrés szempontjából számít. Ha már szétszeded a szervokat, érdemes a tápcsatlakozásra tenni, amit írtam. Általában szokott annyi hely lenni az elektronika mellett, hogy kényelmesen elférjen.
Hálás köszönet .
Sajnos az adatlap nekem kínai. Ezt sem tudtam,hogy az akksit is szokták szűrni ... Ha kész vagyok írok ,mi lett a szervókkal. Köszönöm .
A 11-s lábán semmi sincs .
Valószínű ezért ilyen a szervó ,amilyen . Próbáljam meg a rajz szerint összekötni a 11-7 lábat ellenállással ? köszi .
Szia. Igen ,nekik is hasonló a probléma .
Csak sajnos nem tudom,hogy az én esetmben mit hova tegyek,mivel nem vagyok e.műszerész,csak naggyából ismerem az alkatrészeket . Köszi .
Azzal a különbséggel, hogy az adott esetben nem a visszacsatolás hiszteréziáját javitgatják, hanem a parancsjel reakcio küszöbét. A kettö nem egészen ugyanaz, habár összefüggésben vannak. Ök a potit teljesen kiiktatták.
Tehát a kérdés : mit csináljak a szabadon lévő 11. lábbal?
Miért van szabadon nálad a 11-s láb?(Amugy bátor csávo vagy
).Oda valamilyen ellenállás kell, ami a hiszterézis szabályozza. A rajzodon minden ott van, a többit neked kell kikisérletezni. |
Bejelentkezés
Hirdetés |