Fórum témák
» Több friss téma |
Személyes véleményem, hogy ha zárlat van, akkor bizony szerencsésebb letiltani, mint korlátozni.
Attól, hogy csak korlátozod a zárlati áramot, a zárlatos vezeték/félvezető/motortekercs/alkatrész vagy bármi ami zárlatos, előbb utóbb tönkremegy. Nyilván azzal kellene először tisztában lenni, hogy mikortól is beszélünk zárlatról, mert ugyebár minimum két, de inkább három áramerősségi szintet kellene elkülöníteni. Az első az üzemi áram, a második az impulzusszerű túlterhelési áram, a harmadik meg ugyebár a zárlati áram. Hogy ezeket hogyan különbözteti meg az adott vezérlő, nyilván gyártóspecifikus, de ezt már előzőleg leírtam. Az első áramértéknél ugyebár elég csak a folyamatos áramértéket figyelni. A másodiknál már figyelembe kell venni a túláram időparaméterét is. Ha pl egy 50A -es vezérlő folyamatos üzemben 50A -t vesz fel, akkor még csak üzemi terhelés van. Ha mondjuk 70-100A -t de ezt kb 5-10mp -ig (mondjuk gyorsítás közben) az még elfogadható. Ha ez az áramérték már mondjuk fél perce fennáll, és a sebesség még csak nem is nő, akkor az bizony már tetemes túlterhelés, amiből arra lehet következtetni, hogy valami nem kóser. Na ez eddig mind rendben van, de mi van, ha épp hegyre megy felfelé, ráadásul maxigázon és még szembeszél is van. Akkor szintén van egy elég nagy túlterhelési érték és hiheti az elektronika, hogy itt bizony már zárlat van, holott nincs, csak huzamosabb ideig tartó túlterhelésről van szó. Ez ellen meg úgy lehetne védekezni, hogy vagy visszavesz a teljesítményből, vagy mondjuk manuálisan kapcsolható egy hegymeneti fokozat, így alapból csak az üzemi áramértéket tartja a vezérlő az által, hogy a sebességből visszavesz. Idézet: „(visszatöltés azért csak kellene, nem?).” Arra vigyázni kell hogy a töltőáram ne lépje át a maximális 1/10 C-t ólomakkunál , mert azt nem szereti , ezért építenek ilyen helyre superkap-okat . Ráadásul ez gyorsítást is segíti .
Tudja esetleg valaki hogy BLDC avagy szinkron motoroknál mekkora az a maximális fáziskésés aminél még nem esik ki a motor a szinkron állapotból? pl ha a tekercselés 120°.
Nem tudom mire gondolsz fáziskésés alatt. De elviekben + vagy - 90 fokos terhelési szögnél dobja el magát a szinkron gép (előjel a motoros és a generátoros üzem miatt kell).
(tehelési szög a forgórész mező vektora és a forgómező vektora között mérhető szögérték.)
Igen erre gondoltam. BLDC vezérlőn agyalok, hogy miként szabályozzam gyorsulásnál a motort sztátor feszültségét. Arra gondoltam hogy a hall szenzorok jele alapján képzett elméleti forgó teret elcsúsztatom max +/-90 fokkal már amennyit az áramkorlát enged.
Már nem igazán emlékszem Kelemen hogyan magyarázta de a felszippantott áram / visszatáplálási áram a terhelési szöggel egyre nő. Jól logikázom?  A hozzászólás módosítva: Ápr 30, 2018
Mi a cél? Maximálni a gyorsulást, vagy adott nyomaték tartásával indulni, vagy nyomatékot futtatni valamilyen rámpán, vagy mi?
De ja, lényegében a terhelési szög arányos az állórész áramával (is). A forgatott forgórészmező feszültséget indukál az állórésztekercsben, az állórész külsőleg megkapja a tápfeszét, a kettő különbsége áramot hajt az állórészimpedancián. A különbség természetesen függ a vektorok közötti szögtől (is), tehát függ az állórész áram is. A hozzászólás módosítva: Ápr 30, 2018
A BLDC vezérlőket általában a +/-90-on működtetik, de nem feszültség, hanem áramgenerátorosan. Nem az áram fázishelyzetét, hanem az amplitúdóját szokás változtatni, mint egy DC motoros hajtás (fordulatszám szabályzó alárendelt áramszabályzóval) esetében szokás. +/-90°-on tartozik a legnagyobb nyomaték ugyanazon áramhoz.
Logikus az áramszabályozás ha már az áramot csökkentik azzal a fázisszög is csökken. Rendben ez alapján összehozok valamit amivel lehet kísérletezgetni. köszönöm mindkettőtöknek.
A hozzászólás módosítva: Máj 1, 2018
Ha meguntad a kisérletezgetést, esetleg kipróbálhatnál már létező vezérlést is MC33035 -el. Rendeltem belőle már én is, de még nem jutottam odáig, hogy összerakjam, bár a szabályozási módját nem ismerem ennek az áramkörnek...
A hozzászólás módosítva: Máj 1, 2018
Egységnyi állórészáramhoz, akkor kapod a legnagyobb nyomatékot, ha az állórész mező éppen 90 fokra van a forgórészmezőtől. Az állórész mező irányát vezérlésből adod ki, ha ismered (méred, számolod valamiből) a terhelési szöget, akkor azt akár tarhatod is fix 90 fokon.
De 3 fázisnál négyszög vezérléssel csak meghatározott állórész mező irányokat tudsz kapcsolni (ide-oda-kettő közé, mindezt úgy, hogy minnél többet legyen 90fokos tergelési helyzet közelében a rendszer ...). A diszkrét állómező irányok miatt folyton változó lesz a terhelési szög, ahogy odafordul a rotor. Ha az áram állandó, akkor lüktetni fog a nyomaték, mert változik a terehlési szög, és konstansok a mágneses terek abszolút értékei, (Ha az áram értékét majd a terhelési szög függvényévé teszed, akkor lehet simítani a nyomaték lüktetésén, mert akkor már bármilyen szöghelyzetbe állíthatod az állórész mezejét). Persze, ha szükséges, mert a lüktetést a mechanikai időállandó elöbb utóbb elsimítja. A hozzászólás módosítva: Máj 1, 2018
Sziasztok!
A motor timing beállításában tudna valaki segíteni? Van egy outrunner A2212 motorom Ebayeről, kb. 4$ érték, 6T, 2200KV. Hozzá van egy TSKY 120A szabályzóm, amihez van programkártyám, tehát a timinget tudom állítani. A motor 1/10 buggyba van beépítve teszt miatt. Az a problémám, hogy mikor az autóval tolatok, majd hirtelen előre szeretnék menni, a motor mintha nem tudná kezelni a helyzete, az autó lassul, majd dinamikusan megindul előre, közben nem áll meg az autó, hanem azonnal vált. Mintha a szabályzó túl hamar szeretné a motort előre forgatni, de az autó még gurul hátra. A szabályzó gondolom adná a motornak a megfelelő vezérlést, de azt a motor nem tudja lekövetni, így nagyon melegszik. Jelenleg 26fok-ra van állítva (gyári beállítás). Olvastam olyat, hogy ha a timing túl alacsony, le tudja égetni a szabályzót is. Igaz ez? A hozzászólás módosítva: Máj 15, 2018
Sziasztok!
Elakadtam, és talán tud valaki bölcset mondani a problémámra. Készítettem egy bldc vezérlőt, amely Hall szenzorok segítségével határozza meg a megfelelő fázist. Ehhez készített outrunner motorhoz Hall szenzor tartót a megfelelő szöggel. (14 pol. motor) Mivel számomra fontos az alacsony fordulatszám is (hajó kikötési műveletek), azt gondoltam, hogy a fordulatot 100 ... 5000 1/perc közé lövöm be. Kb. 800-1000-es fordulatig egészen jól megy a dolog, jól is indul akár előre, akár hátra. Viszont ezen fordulatszám fölött abnormálisan elkezd növekedni a felvett teljesítmény. Csak úgy kúszik fel az ampermérő mutatója. A vezérlést mindig a szenzorok léptetik. A rendszer megszakításokkal dolgozik, ezért azt gondolom, hogy szenzor állapot váltásra gyorsan kb. 300 ns alatt reagál, míg az új állapotot kb. 1us időn belül kiteszi. A pwm jel kb. 9.6kHz. Az nFET-ek meghajtója LM5101. Meghajtáskor a H ág felső ágát pwm , alsó ágát inverz pwm vezérli (deadtime 200-400 nsec között állítva is ugyanaz a jelenség). Az L ág mindig GND-re zárva egy nFET-en keresztül Kérdés: a.) Van valakinek ötlete, mi az ördögre nem gondoltam akár a program, akár az elektronika tervezésénél? b.) Érdemes átdolgozni a programot úgy, hogy a fordulat arányában eltoljam az állapot váltás idejét? c.) Érdemes úgy átdolgozni a vezérlést, hogy 800/perc fordulat alatt a Hall szenzor vezérelje az állapotot, míg a felett BEMF elven működjön? Köszönöm, ha foglalkozol a témával!
Reggelt!
Mivel mérési eredményeket nem adtál, csak kíváncsiságból kérdezném, mit jelent az az "...abnormálisan..." jelző? Az természetes, hogy a fordulatszámmal rendesen nő a felvett áram is és ez nem hiszem, hogy minden esetben lineáris lenne. Igazából terhelés függő. A másik amit hiányolok, szkópos mérést végeztél már a kimeneten, megfelelő a jelalak? Nem lehettséges, hogy a kimeneti kapcsoló fetek összenyitnak véletlenül? Az okozhat még irreális áramfelvételt. Viszont mivel csak nagyobb fordulaton következik be úgy néz ki, talán az alkatrészek késleltetése miatt áll elő ez a jelenség. Magyarul, ha pl a felső fet nyitva, és abban a pillanatban vagyunk, hogy épp leveszed a vezérlést, és le kéne hogy zárjon a felső kapcsolófet mielőtt nyitod az alsót, viszont nem érkezik rendesen lezárni a felső (mondjuk a G -n maradt töltés miatt)? Ezt csak szkópos mérésekkel fogod tuni ellenőrizni.
Jó reggelt után Szép Napot!
 Korábban végeztem szkóppal mérést, akkor nagyon úgy tűnt, hogy nem nyitnak össze a FET-ek. Azt gondolom, hogy ez most nem változott meg, hiszen alacsony fordulaton is jelentkezne a probléma. Most nincs módom rendes digitális szkóp használatára. De ha továbbra sem boldogulok, akkor augusztusban Kényszer Úr "meglátogat". Mit jelent az "abnormális"? A tápegység, amellyel tesztelgetek kb. 5A-es. A feszültség kb. 1.5A kitérés után viszont leesik, hiszen a pillanatnyi terhelést nem látom az analóg skálán. Azt gondoltam, hogy csak a tápegység bolondozik velem az induktív terhelés miatt. Kipróbáltam akkumulátorról is.... Nos az akku nem bolondozott. Most van egy vadonatúj panelem, miután kigyulladtak a FET-ek az előző panelen. Tegnap este még csak piszkáltam a programot. Kipróbáltam úgy is a vezérlést, hogy az inverz pwm jelet lekapcsoltam. Tehát a pwm jel meghajtja a H ágat, az L ág pedig fixen nyitott. Ezzel felment a fordulat 3000/perc-re. Úgy néz ki, hogy az LM5101 meghajtó Cboost kondi töltésére elegendő a H ág kikapcsolásakor keletkező induktív lökés. Most akarom kipróbálni a rendszeren a 4, illetve a 19 kHz-es pwm jelet. Most már kitesztelem a dolgokat, ha ennyit szííííívat. Valamint kipróbálok egy másik FET típust is. Most még IRF3205-tel tesztelek. A másik panelra IRF1404 FET-et szerelek.
Szia!
Amit leírtál, nekem úgy tűnik, hogy mégiscsak összenyitnak a fetek. A kapcsolási idők függnek az áram szintektől is, így ha kisebb áramon jól működött, attól még nagyobb áramszinteknél összenyithat. A korábbi hozzászólásodban feltett b, és c, kérdésekre szintén oszcilloszkópos mérések után lehetne megadni. Abból látszana, hogy a motor induktív köre, illetve az áramszabályzó beállási ideje, mekkora késleltetést okoz a különféle sebességeken.
Köszönöm a Te tanácsod is!
Augusztusban mérgetek majd. Addig előkészítem a programot is a méréshez, megfelelő szinkron jeleket generálok. Addig pedig lekorlátozom a fordulatot és a pwm jel szélességét. A hajó teszteléséhez most az 1000-es fordulat is elég lesz.
Kicsit módosítottam a programon, és nagyobb figyelmet fektettem a szenzor állapotok egymás utáni sorrendjére. A LED visszajelzések alapján úgy tűnik, hogy nagyobb fordulaton egyre több probléma volt a sorrenddel. Ez alatt azt értem, hogy a nem mindig jó ütemben kapcsoltak a szenzorok. Hogy ezt mi okozza, még keresem.
Viszont a korábbi verzióban feltételeztem, hogy nem lehet olyan állapot ugrás, amikor cserélni kell mind a felső jelet vezérlő pwm meghajtást adó FET és a fixen nyitva lévő negatív ágat adó FET vezérlést. .... és igen, ha mindkettőt módosítani kell, akkor bizony lehet olyan állapot, amikor összenyit egyik alsó és felső FET.... és már ég is minden. Szóval igazad volt Neked és Rolnak is. Nekem pedig meg kell találnom, hogyan helyezzem fel a Hall elemeket a jobb biztosabb kapcsolás miatt. Köszönöm a segítséget!
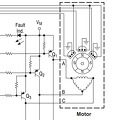
Ha megnézed pl az MC33035 BLDC vezérlő IC adatlapját, abban láthatod, hogy ott hogyan vannak elhelyezve. A két szélső a szomszédos mágneses pólusok határainál, a középső pedig a közöttük lévő mágnes közepénél.
Egyébként nem tudom érdemes -e fejleszteni egyáltalán ilyen vezérlőt, amikor készen is kapható... A hozzászólás módosítva: Júl 17, 2018
Elnézést, csak most értem vissza a hobbihoz.
Kicsit sűrű volt a múlt hónap vége, nem nagyon tudtam foglalkozni ezzel a témával.Korábban már néztem ezt az adatlapot, bár nem ebből a szempontból. Köszönöm a tippet! Feltételezésem szerint az érzékelők jó pozícióban vannak nálam, hiszen nagyon lassú fordulaton is indul a motor mindkét irányba, stabilan, remegés nélkül. A helyzet az, hogy nem találtam még olyan vezérlőt, amely az összes vágyam kielégítette volna. De biztosan csináltak már ilyet, csak nem voltam figyelmes. ... és érdemes-e? Idő és pénz ráfordítást ne kezdje el forszírozni az ember, ha hobbiról van szó.... Ez nálam már egyfajta kihívás. Csak kicsit bénának bizonyulok. Azért még próbálkozom.
Régen én is mindent magam akartam kifejleszteni, de ahogy öregszem, egyre kevesebb időm van ilyenekre. Ezért már azt gondolom, hogy nem szégyen másoktól tanulni.
Esetleg érdekes lehet az alábbi link akár tanuláshoz is: Opensource BLDC Ha már volt itt szó róla, akkor bocsi, nem olvastam végig a topic-ot. Különlegessége, hogy alacsony fordulaton is szépen dolgozik (a fejlesztője szerint), rángatás nélkül indul Hall-szenzorok nélkül is. A fejlesztője készített hozzá PC-s konfiguráló programot is, amiben jelalakok is láthatók. Azóta már több változatot is építettek belőle a hobbisták, egyik verzió a neten is megvásárolható, vagy egy másikhoz csak a NYÁK is beszerezhető.
Köszönöm a tippet! Ezt az oldalt még nem láttam. Sok okosságot gyűjtött össze az oldal.
Még a forrasztásban is láttam újat. Az a kiforrasztós anyag is nagyon felkeltette az érdeklődésem. Nem tudom mi, és hol lehet kapni, de nagyon jó. Átnézem majd az oldalt többször is. Köszi! Z.
Szia!
Már korábban is láttam ezt az oldalt, de én találtam rajta számomra is alkalmazható dolgot. De még átnézem később, ha már javasoltad. Lehet, elkerülte valami a figyelmem. Z.
Sziasztok. Bldc motorvezérlőt szeretném jobban megérteni.Vagyis különösen azt, hogy a 6 db mosfetből, tudjuk, hogy mindig 2 van egy időben bekapcsolva.De mi irányitja ezt a bekapcsolást-kikapcsolást?És hogy pont melyik mosfet-pár kell be és kikapcsoljon?Ez a be és kikapcsolási frekvencia a felelős abban, hogy a motor lassabban vagy gyorsabban forogjon?Előre is köszi a válaszokat.
A hozzászólás módosítva: Okt 1, 2018
A BLDC motorok többsége három fázisú szinkron motor. (szinkron motor olyan motor, amiben a forgórész vagy állandó, vagy csúszógyűrűvel megtáplált elektromágnes) Az ilyen motor működéséhez elő kell állítani az egymáshoz képest 120 fokkal eltolt feszültséget fázisonként. Ezt egy logika állítja elő, a működéshez nem kell feltétlen színuszos jel, lehet kapcsoló jel is, amit a FET -es félhidak kapcsolnak a fázis tekercsekre.
A szinkron motorok jellemzője a szinkron fordulatszám, ami a működtető jel frekvenciájától függ, és ezzel együtt a fordulatszámot is meghatározza. Ha változtatod a három fázist előállító logika frekvenciáját, azzal a fordulatszámot is változtatod. Nem csak három, lehet több fázisú meghajtás is, a lényeg, hogy eredmény egy forgó mágneses mező legyen, mert ezzel fog együtt forogni a motor forgórésze is. Itt találsz bővebb információkat, igaz angolul: Bővebben: Link
Általában mikrokontroller, vagy egy cél IC vezérli. A be és kikapcsolást is ez vezérli, jobb esetben a HALL szenzoroktól származó jel szerint, a forgórész pozíciójától függően, bizonyos állandó sorrend szerint. A HALL szenzor nélküli vezérlők pedig az épp be nem kapcsolt állórész tekercsben indukálódó feszültséget használja fel a forgórészpozíció meghtározására.
Ha az említett két visszajelzési rendszer közül egyik sincs beépítve, akkor a motor kieshet a forgási szinkronból ha túlterhelik... A sebesség pedig valóban a kapcsolási frekvenciától függ. Ha a forgási frekvencia gyorsabb mint amit a tengely forgása követni tudna, megtörténik a szinkronból való kiesés, és a forgás leáll. Ez kompenzálható az előzőleg említett kétféle visszajelzés egyikének alkalmazásával...
Köszi a válaszokat.Még tanulmányozni fogom a témát,mert nem minden világos.Legfőképpen azért mert hiányosak az ismereteim ezzel kapcsolatosan.
Pl a kapcsolási frekvenciát nem a feszültség nagysága szabályozza? A hozzászólás módosítva: Okt 1, 2018
Végül is általában igen. Az igazi BLDC motorban csak a kommutáció van helyettesítve mágnestér érzékelő (Hall) elemmel. Ez ugyanúgy működik, mint egy kefés (általában külső gerjesztésű) motor.
A háromfázisú szinkron motornál kicsit másabb a helyzet, a mikrovezérlő a fázistekercsek áramából érzékeli, hogy mikor kell a következő fázisra adni az áramot a FET kapcsolókkal. A vezérlő egyenfeszültség, és a kapcsolási áramok összevetéséből (komparálásából) számítja ki a mikrovezérlő programmja, hogy mikor kell kapcsolniuk a FET -eknek. Kisebb vezérlő egyen feszültségnél lassabban, nagyobb feszültségnél gyorsabban.
A gyakorlatban látszik, hogy ha a gázkar jel vezetékére nagyobb feszültség kerül akkor a motor is gyorsabban forog.Ez a feszültség változtatása hogyan képes befolyásolni a kapcsolási frekvenciát?
Ooopsz elfelejtettem, hogy egy kerékpárral küzdesz. Bocs.
Annál a hozzászólásomban írt első eset, a hall generátoros játszik. Az ugyanúgy működik, mint egy külső gerjesztésű motor. A kommutátor helyett van a Hall generátor, mint kapcsoló elem. Ha jó helyen van, akkor érzékeli a mágneses tér gyengülését, és az áramot a következő tekercsre kapcsoltatja. |
Bejelentkezés
Hirdetés |