Fórum témák
» Több friss téma |
A léptetö motorok meghajtojának nagy részében semilyen mikrokontroller sincs ( mert az csak ma divatos). 2-3 mezei logikai áramkörrel megoldhato tökéletesen a feladat es van egy sereg céláramkör is hasonlo alapon (L2xx sorozat). Step/Dir átalakitása motorjellé az ABCD, illetve ha olyan a motor 6 bemenetre).
A 3 fázisunal két gond van. Az egyszerübb motorok szinusz feszültséget igényelnek ( ezt teszi a TI áramkör is), a komolyabbak meg több polusu csatival rendelkeznek ( több erösáramu kimenet kell, mint a mezei léptetömotornál), azaz sokkal több jelfeldolgozásra van szükség, amiért nem biztos, hogy ellenszolgáltatást kapsz (egy házi/hobbi CNC gépen egész biztosan nem éri meg ilyen motorral foglalkozni). A hozzászólás módosítva: Okt 15, 2017
Ez így van, de ezt úgy védik ki hogy egy ismert pozicióra állítja először a motort és onnan indítja. Ezért gondolom hogy megvalósítható ez esetben is ugyanis a hall szenzorok jelének a figyelembevételével a BEMF számláló korrigálható.
A szinuszfeszültsének megvan az az előnye, hogy jóval halkabb lesz a gép tőle. Ez sem egy elhanyagolható szempont, sok olyan kollégával beszéltem, hogy egy nem tudják miért, de berezonál a gépük. Az egyik forrás a léptetőmotor (Most nem arra gondolok hogy mire képes egy rossz mechanika). A hobbi pedig szerintem ez esetben azt jelenti hogy otthoni ezközökkel olcsóbban meg lehet oldani sok mindent mint megvásárolni azt az intelektuális munkát amit mí is meg tudunk csinálni.
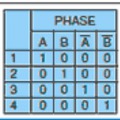
Állits már fel egy logikai táblázatot ( minden mezei léptetömotornak az alapja), hogy melyik lépéshez, milyen logikai állapot van a motor tekercsein. Ez lenne az alap, amiböl ki lehetne indulni.
Gondolom ezt azoknak írtad, akik most látnak először léptetőmotort.
Te firtatod a 3 fázisut, mi lenne ha te mondanád meg hogyan kell azt meghajtani. Én el vagyok a mezei motorokkal is....
 , és épitettem már egy sereg dolgot ilyen motorokkal 82 elött is. , és épitettem már egy sereg dolgot ilyen motorokkal 82 elött is.
Végül is olcsón lehet venni részegységeket egy hobbicnc géphez, ezért nehéz más megoldást választani, mint amihez ott van az 1500 forintos vezérlő. Ez is egy megközelítés. De akik elektronikával foglalkozunk, hajlamosak vagyunk magunkról azt képzelni, hogy mí vagyunk a fejlődés úttörői, a világ azért lett jobb mert mí fejlesztettünk ezközöket amelyek könnyebbé teszik a munkánkat. Én is így gondolom, és így is akarok cselekedni. Ezért keresek új megoldásokat,ezért szeretem a fejlesztő munkát. Ebben csak egy fogalom nincs: az hogy nem lehet. A mikrokontroller nem csak egy divat. Akkora szabadságot ad, hogy azt klasszikus (inkább más tipúsú, mert már sok kontroller felett is eljárt az idő) áramkörökkel nem lehet helyettesíteni. A visszacsatolás pedig szerintem nagyobb biztonságot ad a megmunkálásban, bármilyen legyen is az (biztos járt már más is úgy, hogy lépésvesztés miatt elrontott egy alkatrészt, jó itt lehet mondani, hogy nem volt jól méretezve, dehát szerintem a legtöbb hobbista a saját hibáiból tanul) azonban az enkóderek is drágák, ezért gondolkozom én egyszerübb visszacsatoláson (akár pl BEMF+egy olcsóbb, kevés poziciós enkóder, vagy hall jeladó) Szoftveresen is sokmindent meg lehet oldani. Akinek ehhez nincs kedve, az vehet az e-bay-ről 1000 forintért meghajtót. Ilyen nekem is van, ezért gondolkozok máson.
Úgy látom te még mindig el vagy azzal hogy te vagy a legokosabb. Jók a te motorjaid, csak így tovább. A Marsra is felmentek nema17-es 2 fázisú léptetőmotorral (Az átlag 200 lépéses, tehát 1.8 fokos, míg a 3 fázisú az átlag 1,2 fokos tehát 300 lépés/fordulat, biztos ez is erősen hátrányos.
Én is inkább kérdeztem, de igen szerintem úgy kell meghajtani mint egy 3 fázisú BLDC motort, csak egy egész lépésnél nem 60 fokot fog fordulni, hanem 1,2 fokot, tehát egy fordulat 300 lépés, ami szerintem nem rossz.
Én még nem látom át, hogy kis sebességen, mikrolépést használva (hogy szinuszos legyen a jel), egy teljes lépésen belül hogy különböztetsz meg pozíciót a BEMF jel alapján. A hall az már jeladó, hogy elég-e a felbontása az már más kérdés.
A pozicio visszacsatolás jo, de a BEMF nem az!
Ahhoz, hogy a lépest tudd, a motorra kell valami, ami függetlenül a motor vezérlésétöl tudja, hogy valoban hányat lépett és merre a motor és az adott pillanatban hol van. Azt a BMEF-böl nem tudod kiolvasni. Azaz ha kiszenveded a BMEF-s visszacsatolást legjobb esetben is csak ott vagy ahol ma is minden léptetö motor van a vezérlövel. Kapott X jelet és lépett Y lépést. Ha a kettö nem azonos, akkor baj van. Ezért ha biztosra kell menni, kell a kodtárcsa vagy szalag a rendszerbe. ( amugy rengeteg megoldásban ha kodtárcsa van, akkor a motor egy primitiv DC motor is lehet, mert a kodtárcsával azt is meglehetösen pontosan lehet vezérelni).
Ird már le mikor milyen jelet kell ilyen esetben a BLDC motor 3 kivezetésére adni, hogy 300 állást tudjon 360 fokban.
Légyszives ne adj a számba olyasmit amit nem állitottam! Töled várjuk a megoldást azzal kellene foglalkoznod s nem velem.
Jó most azzal fogsz jönni, hogy de a mikrolépések, erre az a válaszom, hogy nem mindegy, hogy 200 lépést szorzol tovább, vagy háromszázat. Na ezért a három fázis. És hogy mért nem, szervó, hát azért mert nem akarok a PID beállításával szenvedni. Úgy meg mi értelme a mikrolépésnek, ha egész lépéssel megvan az 2 század pontosság. Fél lépéssel ez 1 század mm Aki ennél jobb mechanikát csinál otthon, az írja meg, és vele csináltatom meg az én gépem vázát.
A velem folytatott vita helyett mutass már be egy ilyen (hasonlo) táblát a te 3 fázisu motorodra.
Itt minden világos, minden lépés a motor bizonyos elfordulásának felel meg. ( adva a motor konstrukciojával - a legprimitivebb esetben 4 kivezetésü motornál). A mindenféle mikrostep stb csak ezután jön. Mutass be ugyan táblát a te megoldásodra, hogy végre már megtudjuk, hogyan kell egy 3 fázisu léptetö motort vagy BLDC motort meghajtani. Ennyi
Úgy látom hogy még mindig nem értitek, hogy háromfázisú léptetőmotorról beszélek és nem háromfázisú BLDC motorról. Aki nem tudná a hasonlóság csak annyi, hogy mind a kettő három tekercset (vagy három tekerccsoportot) tartalmaz. A külömbség pedig az, hogy a legegyszerübb BLDC motor egy lépésre 60 fokot fordul, míg egy 1,2 fokos háromfázisú léptetőmotor egy lépésre 1.2 fokot fordul. Ennél egyszerübben nem tudom leírni. Ellenben pontosan azt mondom , hogy egy BLDC motorvezérlővel működtethető.
Értjük, csak nem látunk töled a vitán kivül semmit.
Mutasd be hogyan kell azt a 3 tekercset vezérelni, hogy müködjön a motor.
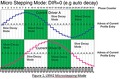
Azért a dolog egy kicsit összetettebb, mint a léptetőmotornál, itt van a egy diagramm ami szemlélteti a működését
A hozzászólás módosítva: Okt 15, 2017
Akit érdekel a téma,itt tud olvasni még róla.
A mellékelt linken látható, hogy milyen motort szeretnék vezérelni.
A következő linken látható egy visszacsatolásos 3 fázisú vezérlő. Úgy gondolom, hogy meg lehet csinálni egy hasonló teljesítményűt a BEMF figyelésével (+ egy egyszerű jeladó, nem egy 1000 lépéses, hanem pl hall szenzor vagy szenzorok, amivel korrigálni lehet a BEMF jelet)
Én is kikerestem Neked a jelakokat a 3 fázisu léptetö motorra, ami amint láthatod minden csak nem szinusz, és a 3 fázist neked kell extrán kialakitani a Step/Dir jelböl, ami szintén megoldhato konvencionális logikai áramkörökkel vagy procival.
Ráadásul ahogy most utánnaolvastam a finomabb motorok is csak 3,75 fokos lépést tudnak ( a kétfázisuakbol én a 0,9 fokosat is gyakran használom). Szoval egy sereg izzadás után el lehet jutni a 2 fázisu motor szintjére, és csak nagyon különleges feladatokra érdemes ilyet használni ( nagy nyomtatokban szokott lenni meg orvosi berendezésekben).
Ha megnézed a linket amit küldtem, hasonló trapéz formája van mint amit te linkeltél. Végre egy közös pont, amiben egyetértünk. Ellenben ez az áramforma csak az egyszerűbb vezérlőkre jellemző. Ugyanakkor, a mikrolépéses léptetőmotor vezérlésnél, szerinted mihez közelít az áramforma (Hát nem a szinuszhoz? Csak kérdezem). Amúgy mit gondolsz mivel foglalkozom ( orvosi berendezésekkel
 ) Ezt nem akartam nagyon hangsúlyozni, nem azért vagyok itt, hanem meghallgatni mások véleményét is. A véleményeket meghallgatom, de a kioktatást nem szeretem. ) Ezt nem akartam nagyon hangsúlyozni, nem azért vagyok itt, hanem meghallgatni mások véleményét is. A véleményeket meghallgatom, de a kioktatást nem szeretem.
Sehol nem közelit a szinuszhoz ( mert a szinusz a BLDC motorra kell, s nem a 3 fázisú léptetö motorra), mert mikrostepnél is éppenolyan digitális szintek mennek a tekercsekre, mint alapjáratban, ( amit te itt "majdnem" szinusznak nézel az csak a szkop X tengely nagyitása) csak más algoritmus szerint - azaz a 3 lépés helyett 6 lépés lesz és soha sem lesz olyan állapot, hogy egy tekercsen nem lesz semilyen vezérlöjel ( ami az alapvezérlésnél elöfordul).
Ez valószínű a kotángensre hasonlít

Biztos, hogy érdemes lenne egy visszacsatolás a motorra, de érdemes e vele foglalkozni az itt a kérdés?
Valamilyen szintem megpróbál korrigálni, vagy azonnal le is tilt ha sok a hiba.
Mindenképp van előnye a visszacsatolásnak !
Csak megjegyezném, mi értelme van ilyen léptetőmotorokkal szenvedni akkor inkább DC szervó vezérlést kell csinálni, már ha valaki ennyire ért a programozáshoz stb.
Én a Gizikéröl, te meg a gözekéröl csevegsz.
Nézd meg annak a képnek az alját. Az a fekete jel felel meg a stepnek, azaz az adott pillanatban a tekercsen csak az a szegmens van ami megfelel annak a jel egy periodusának ( egy függöleges oszlop). Azaz pl a 3. lépésben a kék tekercsen kb fél feszültség van de nem szinusz. Ha igy lépteted akkor lassan változnak a feszültségek a tekercsen, de sehol sem lesz szinusz, legfeljebb igy megrajzolva. Mi van akkor ha megszünik a jel a 3. lépés után ( a kép tetején vannak a lépések)? Milyen szintek maradnak a tekercseken? A szinusz jel csak gyakorlatilag folyamatos fordulatnál állna össze, ami a CNC gépre nem jellemzö. Sajnos nem tudom jobban megvágni, de igy is talán láthatod, hogy mi van egyenként a 3.,4. meg az 5. lépésben motor 2 tekercsén. |
Bejelentkezés
Hirdetés |